Mesa 7i95
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17931
- Thank you received: 5255
09 Oct 2021 16:20 - 09 Oct 2021 16:21 #222659
by PCW
Replied by PCW on topic Mesa 7i95
Delete the old directory before the new clone:
rm -rf mesaflash
rm -rf mesaflash
Last edit: 09 Oct 2021 16:21 by PCW.
Please Log in or Create an account to join the conversation.
- mittim
-

- Offline
- Premium Member
-

Less
More
- Posts: 92
- Thank you received: 5
09 Oct 2021 16:31 - 09 Oct 2021 16:37 #222661
by mittim
Replied by mittim on topic Mesa 7i95
deleted the mesaflash directory and still on 3.3.0:
tim@cnc:~$ sudo apt install libpci-dev pkg-config build-essential git
[sudo] Passwort für tim:
Paketlisten werden gelesen... Fertig
Abhängigkeitsbaum wird aufgebaut.
Statusinformationen werden eingelesen.... Fertig
git ist schon die neueste Version (1:2.11.0-3+deb9u7).
build-essential ist schon die neueste Version (12.3).
libpci-dev ist schon die neueste Version (1:3.5.2-1).
pkg-config ist schon die neueste Version (0.29-4+b1).
Die folgenden Pakete wurden automatisch installiert und werden nicht mehr benötigt:
gconf2 gnome-mime-data libbonobo2-0 libbonobo2-common libbonoboui2-0
libbonoboui2-common libevent-2.0-5 libgnome-2-0 libgnome2-common
libgnomecanvas2-0 libgnomecanvas2-common libgnomeui-0 libgnomeui-common
libgnomevfs2-0 libgnomevfs2-common libidl-2-0 libjsoncpp1 libmicrodns0
liborbit-2-0 liborbit2 python-gconf python-gnome2 python-pyorbit
Verwenden Sie »sudo apt autoremove«, um sie zu entfernen.
0 aktualisiert, 0 neu installiert, 0 zu entfernen und 6 nicht aktualisiert.
tim@cnc:~$ git clone github.com/LinuxCNC/mesaflash.git
Klone nach 'mesaflash' ...
remote: Enumerating objects: 2129, done.
remote: Counting objects: 100% (472/472), done.
remote: Compressing objects: 100% (230/230), done.
remote: Total 2129 (delta 281), reused 392 (delta 234), pack-reused 1657
Empfange Objekte: 100% (2129/2129), 881.16 KiB | 0 bytes/s, Fertig.
Löse Unterschiede auf: 100% (1478/1478), Fertig.
tim@cnc:~$ cd mesaflash
tim@cnc:~/mesaflash$ make
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c common.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c lbp.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c lbp16.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c bitfile.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c hostmot2.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c eeprom.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c anyio.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c eth_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c epp_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c usb_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c pci_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c sserial_module.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c encoder_module.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c eeprom_local.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c eeprom_remote.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c spi_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c serial_boards.c
rm -f libanyio.a mesaflash
ar rcs libanyio.a common.o lbp.o lbp16.o bitfile.o hostmot2.o eeprom.o anyio.o eth_boards.o epp_boards.o usb_boards.o pci_boards.o sserial_module.o encoder_module.o eeprom_local.o eeprom_remote.o spi_boards.o serial_boards.o
ranlib libanyio.a
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c mesaflash.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -o mesaflash mesaflash.o libanyio.a -lm -lpci
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c examples/pci_encoder_read.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -o pci_encoder_read pci_encoder_read.o libanyio.a -lm -lpci
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c examples/pci_analog_write.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -o pci_analog_write pci_analog_write.o libanyio.a -lm -lpci
tim@cnc:~/mesaflash$ mesaflash
Mesaflash version 3.3.0~pre (built on Jun 28 2017 03:52:31 with libpci 3.5.2)
Configuration and diagnostic tool for Mesa Electronics PCI(E)/ETH/EPP/USB boards
(C) 2013-2015 Michael Geszkiewicz (contact: This email address is being protected from spambots. You need JavaScript enabled to view it.)
(C) Mesa Electronics
Try 'mesaflash --help' for more information
tim@cnc:~/mesaflash$ sudo make install
install -p -D --mode=0755 --owner root --group root mesaflash /bin/mesaflash
install -p -D --mode=0644 --owner root --group root mesaflash.1 /share/man/man1/mesaflash.1
tim@cnc:~/mesaflash$ mesaflash
Mesaflash version 3.3.0~pre (built on Jun 28 2017 03:52:31 with libpci 3.5.2)
Configuration and diagnostic tool for Mesa Electronics PCI(E)/ETH/EPP/USB boards
(C) 2013-2015 Michael Geszkiewicz (contact: This email address is being protected from spambots. You need JavaScript enabled to view it.)
(C) Mesa Electronics
Try 'mesaflash --help' for more information
tim@cnc:~/mesaflash$ ^C
tim@cnc:~/mesaflash$
tim@cnc:~$ sudo apt install libpci-dev pkg-config build-essential git
[sudo] Passwort für tim:
Paketlisten werden gelesen... Fertig
Abhängigkeitsbaum wird aufgebaut.
Statusinformationen werden eingelesen.... Fertig
git ist schon die neueste Version (1:2.11.0-3+deb9u7).
build-essential ist schon die neueste Version (12.3).
libpci-dev ist schon die neueste Version (1:3.5.2-1).
pkg-config ist schon die neueste Version (0.29-4+b1).
Die folgenden Pakete wurden automatisch installiert und werden nicht mehr benötigt:
gconf2 gnome-mime-data libbonobo2-0 libbonobo2-common libbonoboui2-0
libbonoboui2-common libevent-2.0-5 libgnome-2-0 libgnome2-common
libgnomecanvas2-0 libgnomecanvas2-common libgnomeui-0 libgnomeui-common
libgnomevfs2-0 libgnomevfs2-common libidl-2-0 libjsoncpp1 libmicrodns0
liborbit-2-0 liborbit2 python-gconf python-gnome2 python-pyorbit
Verwenden Sie »sudo apt autoremove«, um sie zu entfernen.
0 aktualisiert, 0 neu installiert, 0 zu entfernen und 6 nicht aktualisiert.
tim@cnc:~$ git clone github.com/LinuxCNC/mesaflash.git
Klone nach 'mesaflash' ...
remote: Enumerating objects: 2129, done.
remote: Counting objects: 100% (472/472), done.
remote: Compressing objects: 100% (230/230), done.
remote: Total 2129 (delta 281), reused 392 (delta 234), pack-reused 1657
Empfange Objekte: 100% (2129/2129), 881.16 KiB | 0 bytes/s, Fertig.
Löse Unterschiede auf: 100% (1478/1478), Fertig.
tim@cnc:~$ cd mesaflash
tim@cnc:~/mesaflash$ make
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c common.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c lbp.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c lbp16.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c bitfile.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c hostmot2.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c eeprom.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c anyio.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c eth_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c epp_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c usb_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c pci_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c sserial_module.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c encoder_module.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c eeprom_local.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c eeprom_remote.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c spi_boards.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c serial_boards.c
rm -f libanyio.a mesaflash
ar rcs libanyio.a common.o lbp.o lbp16.o bitfile.o hostmot2.o eeprom.o anyio.o eth_boards.o epp_boards.o usb_boards.o pci_boards.o sserial_module.o encoder_module.o eeprom_local.o eeprom_remote.o spi_boards.o serial_boards.o
ranlib libanyio.a
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c mesaflash.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -o mesaflash mesaflash.o libanyio.a -lm -lpci
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c examples/pci_encoder_read.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -o pci_encoder_read pci_encoder_read.o libanyio.a -lm -lpci
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -c examples/pci_analog_write.c
gcc -O0 -g -Wall -Wextra -Werror -std=c99 -D_GNU_SOURCE -D_FILE_OFFSET_BITS=64 -DMESAFLASH_IO=1 -o pci_analog_write pci_analog_write.o libanyio.a -lm -lpci
tim@cnc:~/mesaflash$ mesaflash
Mesaflash version 3.3.0~pre (built on Jun 28 2017 03:52:31 with libpci 3.5.2)
Configuration and diagnostic tool for Mesa Electronics PCI(E)/ETH/EPP/USB boards
(C) 2013-2015 Michael Geszkiewicz (contact: This email address is being protected from spambots. You need JavaScript enabled to view it.)
(C) Mesa Electronics
Try 'mesaflash --help' for more information
tim@cnc:~/mesaflash$ sudo make install
install -p -D --mode=0755 --owner root --group root mesaflash /bin/mesaflash
install -p -D --mode=0644 --owner root --group root mesaflash.1 /share/man/man1/mesaflash.1
tim@cnc:~/mesaflash$ mesaflash
Mesaflash version 3.3.0~pre (built on Jun 28 2017 03:52:31 with libpci 3.5.2)
Configuration and diagnostic tool for Mesa Electronics PCI(E)/ETH/EPP/USB boards
(C) 2013-2015 Michael Geszkiewicz (contact: This email address is being protected from spambots. You need JavaScript enabled to view it.)
(C) Mesa Electronics
Try 'mesaflash --help' for more information
tim@cnc:~/mesaflash$ ^C
tim@cnc:~/mesaflash$
Attachments:
Last edit: 09 Oct 2021 16:37 by mittim.
Please Log in or Create an account to join the conversation.
- mittim
-
- Offline
- Premium Member
-
Less
More
- Posts: 92
- Thank you received: 5
09 Oct 2021 16:44 #222662
by mittim
Replied by mittim on topic Mesa 7i95
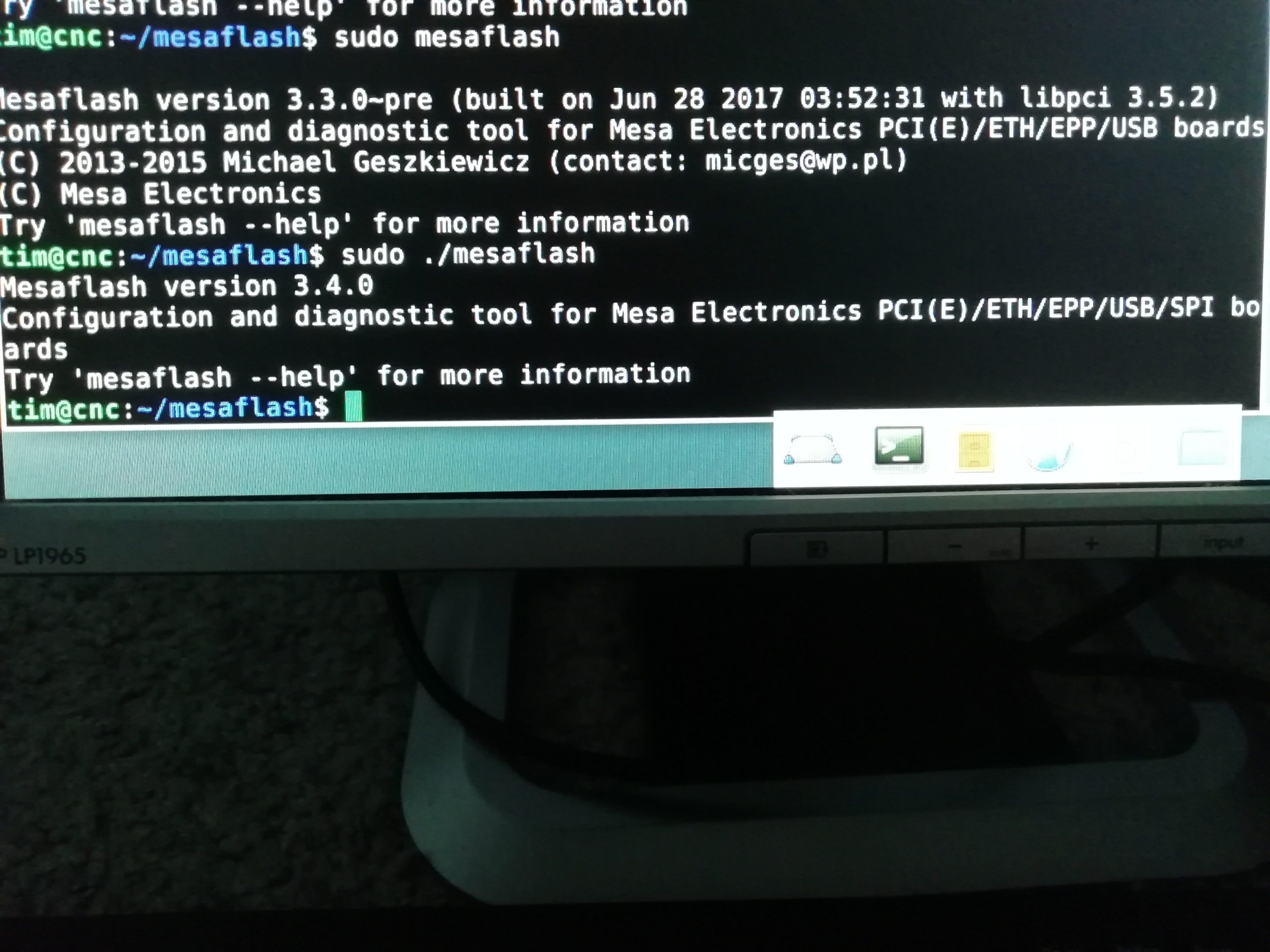
But there seems to be a version 3.4:
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17931
- Thank you received: 5255
09 Oct 2021 16:46 - 09 Oct 2021 17:07 #222663
by PCW
Replied by PCW on topic Mesa 7i95
You did not install the newer mesaflash:
sudo make install
EDIT
No, I see you did install the new version, maybe the old version
was installed somewhere else.
You might try:
which mesaflash
to find out the path of the older version and then delete the older version
sudo make install
EDIT
No, I see you did install the new version, maybe the old version
was installed somewhere else.
You might try:
which mesaflash
to find out the path of the older version and then delete the older version
Last edit: 09 Oct 2021 17:07 by PCW.
Please Log in or Create an account to join the conversation.
- mittim
-
- Offline
- Premium Member
-
Less
More
- Posts: 92
- Thank you received: 5
09 Oct 2021 17:06 - 09 Oct 2021 17:06 #222665
by mittim
Replied by mittim on topic Mesa 7i95
I don´t know what´s the issue

tim@cnc:~/mesaflash$ sudo make install
install -p -D --mode=0755 --owner root --group root mesaflash /bin/mesaflash
install -p -D --mode=0644 --owner root --group root mesaflash.1 /share/man/man1/mesaflash.1
tim@cnc:~/mesaflash$ mesaflash
Mesaflash version 3.3.0~pre (built on Jun 28 2017 03:52:31 with libpci 3.5.2)
Configuration and diagnostic tool for Mesa Electronics PCI(E)/ETH/EPP/USB boards
(C) 2013-2015 Michael Geszkiewicz (contact: This email address is being protected from spambots. You need JavaScript enabled to view it.)
(C) Mesa Electronics
Try 'mesaflash --help' for more information
tim@cnc:~/mesaflash$
tim@cnc:~/mesaflash$ sudo make install
install -p -D --mode=0755 --owner root --group root mesaflash /bin/mesaflash
install -p -D --mode=0644 --owner root --group root mesaflash.1 /share/man/man1/mesaflash.1
tim@cnc:~/mesaflash$ mesaflash
Mesaflash version 3.3.0~pre (built on Jun 28 2017 03:52:31 with libpci 3.5.2)
Configuration and diagnostic tool for Mesa Electronics PCI(E)/ETH/EPP/USB boards
(C) 2013-2015 Michael Geszkiewicz (contact: This email address is being protected from spambots. You need JavaScript enabled to view it.)
(C) Mesa Electronics
Try 'mesaflash --help' for more information
tim@cnc:~/mesaflash$
Last edit: 09 Oct 2021 17:06 by mittim.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17931
- Thank you received: 5255
09 Oct 2021 17:08 #222666
by PCW
Replied by PCW on topic Mesa 7i95
See my previous edited response
Please Log in or Create an account to join the conversation.
- mittim
-
- Offline
- Premium Member
-
Less
More
- Posts: 92
- Thank you received: 5
09 Oct 2021 17:16 - 09 Oct 2021 17:16 #222667
by mittim
Replied by mittim on topic Mesa 7i95
That´s it!!! ")
There was a mesaflash file in /usr/bin.
Now readhmid in mesaflash works.
Thank you for your patience.
There was a mesaflash file in /usr/bin.
Now readhmid in mesaflash works.
Thank you for your patience.
Last edit: 09 Oct 2021 17:16 by mittim.
Please Log in or Create an account to join the conversation.
- mittim
-
- Offline
- Premium Member
-
Less
More
- Posts: 92
- Thank you received: 5
09 Oct 2021 19:50 #222679
by mittim
Replied by mittim on topic Mesa 7i95
Is there a basic .hal file for the 7i95 to test STEP/DIR outputs?
I adjusted mine, changing "7i96" to 7i95". What else has to be done, to get an output on the stepgens?
I adjusted mine, changing "7i96" to 7i95". What else has to be done, to get an output on the stepgens?
# Erstellt von PNCconf am Sat Oct 9 21:43:46 2021
# Using LinuxCNC version: Master (2.9)
# Änderungen an dieser Datei werden beim nächsten
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=1 num_pwmgens=0 num_stepgens=5 sserial_port_0=0xxxxx"
setp hm2_7i95.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_7i95.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_7i95.0.write servo-thread
# external output signals
# external input signals
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.x.maxerror 0.012700
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# Step Gen signals/setup
setp hm2_7i95.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_7i95.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_7i95.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_7i95.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_7i95.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_7i95.0.stepgen.00.step_type 0
setp hm2_7i95.0.stepgen.00.control-type 1
setp hm2_7i95.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_7i95.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-vel-cmd <= joint.0.vel-cmd
net x-output <= hm2_7i95.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_7i95.0.stepgen.00.position-fb
net x-pos-fb => joint.0.motor-pos-fb
net x-enable <= joint.0.amp-enable-out
net x-enable => hm2_7i95.0.stepgen.00.enable
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.y.maxerror 0.012700
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# Step Gen signals/setup
setp hm2_7i95.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_7i95.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_7i95.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_7i95.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_7i95.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_7i95.0.stepgen.01.step_type 0
setp hm2_7i95.0.stepgen.01.control-type 1
setp hm2_7i95.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_7i95.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-vel-cmd <= joint.1.vel-cmd
net y-output <= hm2_7i95.0.stepgen.01.velocity-cmd
net y-pos-fb <= hm2_7i95.0.stepgen.01.position-fb
net y-pos-fb => joint.1.motor-pos-fb
net y-enable <= joint.1.amp-enable-out
net y-enable => hm2_7i95.0.stepgen.01.enable
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.z.maxerror 0.012700
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# Step Gen signals/setup
setp hm2_7i95.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_7i95.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_7i95.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_7i95.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_7i95.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_7i95.0.stepgen.02.step_type 0
setp hm2_7i95.0.stepgen.02.control-type 1
setp hm2_7i95.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_7i95.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-vel-cmd <= joint.2.vel-cmd
net z-output <= hm2_7i95.0.stepgen.02.velocity-cmd
net z-pos-fb <= hm2_7i95.0.stepgen.02.position-fb
net z-pos-fb => joint.2.motor-pos-fb
net z-enable <= joint.2.amp-enable-out
net z-enable => hm2_7i95.0.stepgen.02.enable
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17931
- Thank you received: 5255
09 Oct 2021 20:09 #222681
by PCW
Replied by PCW on topic Mesa 7i95
A 7i96 stepgen config will work on a 7I95
Typical first time reasons for step/dir not working are:
1. Wiring errors
2, Step times too short (start with at least 5000 ns)
Typical first time reasons for step/dir not working are:
1. Wiring errors
2, Step times too short (start with at least 5000 ns)
Please Log in or Create an account to join the conversation.
- mittim
-
- Offline
- Premium Member
-
Less
More
- Posts: 92
- Thank you received: 5
09 Oct 2021 21:15 #222690
by mittim
Replied by mittim on topic Mesa 7i95
wiring is okay, duble checked each plug-to-plug.
step times are set to 10000ns.
Also, Linuxcnc does not show any error, when i randomly disconnect the card.
step times are set to 10000ns.
Also, Linuxcnc does not show any error, when i randomly disconnect the card.
Please Log in or Create an account to join the conversation.
Moderators: PCW, jmelson
Time to create page: 0.193 seconds