2 seperate MPG handwheels for each axis - CNC Lathe build
- rodw
-

- Offline
- Platinum Member
-

- Posts: 11994
- Thank you received: 4084
I appreciate that this stuff take us way outside our comfort zone. But by using a digital switch that can count to 4 in binary saves pins. eg. We get 4 states out of 4 pins.... That was my big discovery, Re read my tutorial
")
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
- Posts: 11994
- Thank you received: 4084
I never used any resistors.
Please Log in or Create an account to join the conversation.
- denhen89
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 301
- Thank you received: 27

Current situation: The wiring is done as shown on this manual (page: Connection of MPG's): wiki.eusurplus.com/downloads/7i76E.pdf
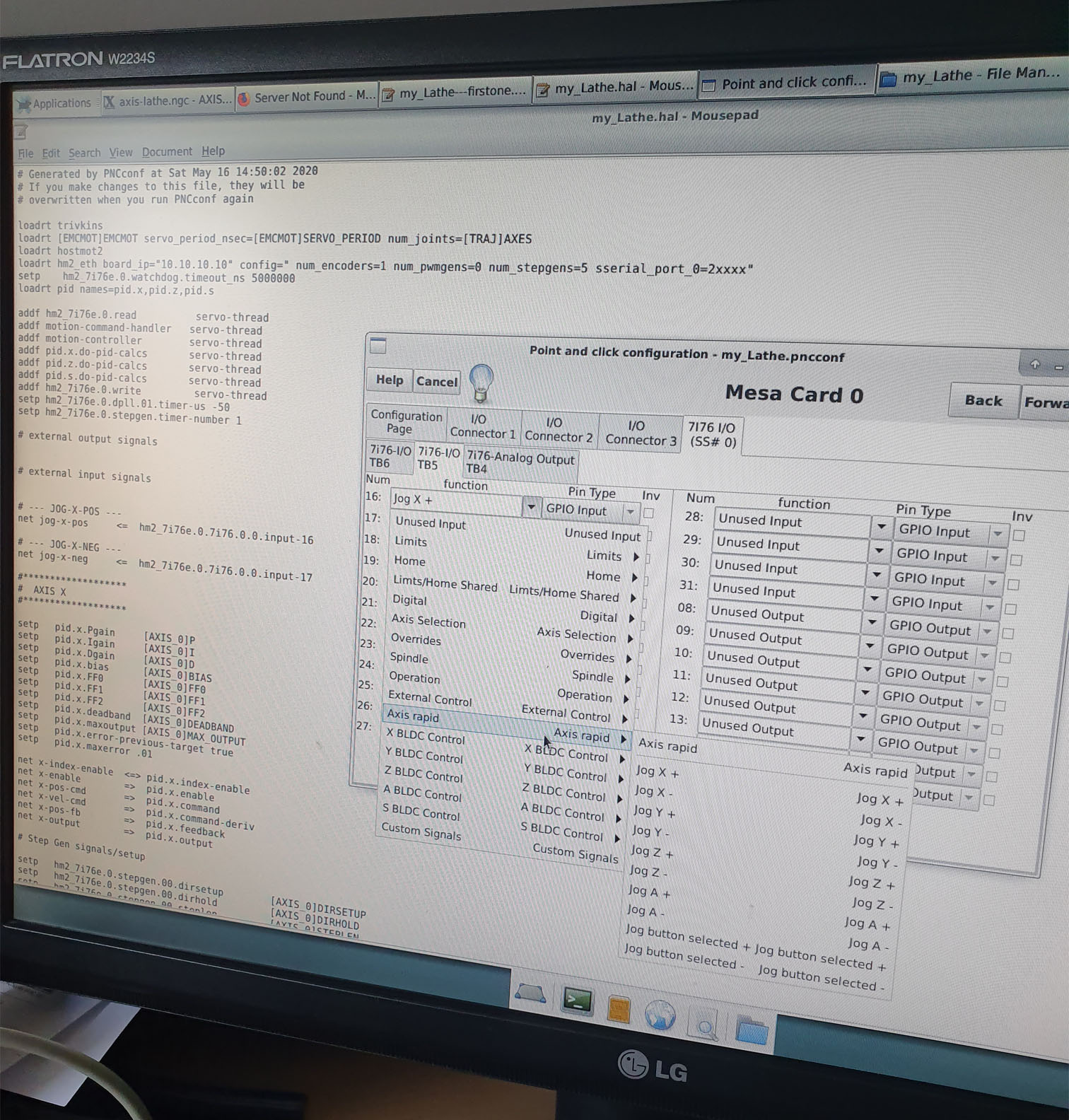
Now i would like to make the setup for the MPG with the PCCONF tool: I am on the configuration page on the main Tab "7i76 I/O (SS 0)" and the daughter tab "7i76-I/O TB5". There os jabe to chose the function. I choosed "Jog X +" for Input 16 and "Jog X -" for Input 17, which is for sure wrong, because nothing happend on the AXIS GUI DRO, but the MPG gives 5v when turning the handwheel.
Attachments:
Please Log in or Create an account to join the conversation.
- Mike_Eitel
-

- Offline
- Platinum Member
-
- Posts: 1052
- Thank you received: 183
Please Log in or Create an account to join the conversation.
- denhen89
-
Topic Author
- Offline
- Elite Member
-
- Posts: 301
- Thank you received: 27
Please Log in or Create an account to join the conversation.
- Mike_Eitel
-
- Offline
- Platinum Member
-
- Posts: 1052
- Thank you received: 183
It is based on gmoccapy
In that there are a lot of hals. If i remember right one is called mpg...
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

- Posts: 21700
- Thank you received: 7417
@Danhen, you are not using two power supplies , so you are good and the wiring should be ok if those are +5V and gnd from the Mesa with the red and black wire.
@Rod, those are pull up resistor as the encoder has open collector outputs, so it can pull the signal to ground but not to +5V.
@Danhen, in pncconf, there is the option of using MPG, but i think it is for the spindle encoder, so you can set that and later edit the hal to point them to the actual encoders.
Please Log in or Create an account to join the conversation.
- denhen89
-
Topic Author
- Offline
- Elite Member
-
- Posts: 301
- Thank you received: 27
Sorry for my lathe reply, but unfortunately (as always with Linux) i had and still have problems with my wifi on the test pc. Its disconnecting from time to time when using a brower. But it does not matter right now.
To Mikel_Eitel: I cant find that post: #130396. Could you send me the link?
To tommylight: thanks, but its impossible to get it done for me, because i just dont know what i am doing or what i have to do. Its so complicated for me and i really dont know why. The CNC router with the cheap BOB was so easy to set up, but i really dont know how to do that with the mpg handwheels.
I try to check some settings from others, but the first thing which i just dont understand is, why in no lines in the HAL are the input pines pointed out.
Like for example i found this answer from Andypugh on that topic Mesa 5i25 and 7176 getting started :
Then connect the mpg to each axis:
net x-jog hm2_5i25.0.7i76.0.0.enc0.count => axis.0.jog-counts
net z-jog hm2_5i25.0.7i76.0.0.enc1.count => axis.2.jog-counts
Are there no input pins missing? I just dont get it. No even a bit. I would really wish someone would make a tutorial or something and not just give 10% info. At least i think that its impossible to know what to do for a "mesa beginner" as i am.
Here one more example of a HAL file to explain you what i dont understand (it was for a 3 axis mpg pendant i think) from this topic: 5i25 7i76 mpg help please
# Generated by PNCconf at Sun Apr 3 20:58:52 2011
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt trivkins
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hostmot2
loadrt hm2_pci config=" num_encoders=1 num_pwmgens=0 num_stepgens=5 sserial_port_0=200xxxx"
setp hm2_5i25.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
loadrt mux16 names=jogincr
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf jogincr servo-thread
addf hm2_5i25.0.write servo-thread
# external output signals
# --- MACHINE-IS-ENABLED ---
net machine-is-enabled hm2_5i25.0.7i76.0.0.output-07
# external input signals
# --- HOME-X ---
net home-x <= hm2_5i25.0.7i76.0.0.input-00
# --- HOME-Y ---
net home-y <= hm2_5i25.0.7i76.0.0.input-01
# --- HOME-Z ---
net home-z <= hm2_5i25.0.7i76.0.0.input-02
# --- JOINT-SELECT-A ---
net joint-select-a <= hm2_5i25.0.7i76.0.0.input-20
# --- JOINT-SELECT-B ---
net joint-select-b <= hm2_5i25.0.7i76.0.0.input-21
# --- JOINT-SELECT-C ---
net joint-select-c <= hm2_5i25.0.7i76.0.0.input-22
# --- JOG-INCR-A ---
net jog-incr-a <= hm2_5i25.0.7i76.0.0.input-24
# --- JOG-INCR-B ---
net jog-incr-b <= hm2_5i25.0.7i76.0.0.input-25
# --- JOG-INCR-C ---
net jog-incr-c <= hm2_5i25.0.7i76.0.0.input-26
#*******************
# AXIS X
#*******************
setp pid.x.Pgain [AXIS_0]P
setp pid.x.Igain [AXIS_0]I
setp pid.x.Dgain [AXIS_0]D
setp pid.x.bias [AXIS_0]BIAS
setp pid.x.FF0 [AXIS_0]FF0
setp pid.x.FF1 [AXIS_0]FF1
setp pid.x.FF2 [AXIS_0]FF2
setp pid.x.deadband [AXIS_0]DEADBAND
setp pid.x.maxoutput [AXIS_0]MAX_OUTPUT
setp pid.x.error-previous-target true
setp pid.x.maxerror .0005
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-vel-cmd => pid.x.command-deriv
net x-pos-fb => pid.x.feedback
net x-output => pid.x.output
# Step Gen signals/setup
setp hm2_5i25.0.stepgen.00.dirsetup [AXIS_0]DIRSETUP
setp hm2_5i25.0.stepgen.00.dirhold [AXIS_0]DIRHOLD
setp hm2_5i25.0.stepgen.00.steplen [AXIS_0]STEPLEN
setp hm2_5i25.0.stepgen.00.stepspace [AXIS_0]STEPSPACE
setp hm2_5i25.0.stepgen.00.position-scale [AXIS_0]STEP_SCALE
setp hm2_5i25.0.stepgen.00.step_type 0
setp hm2_5i25.0.stepgen.00.control-type 1
setp hm2_5i25.0.stepgen.00.maxaccel [AXIS_0]STEPGEN_MAXACCEL
setp hm2_5i25.0.stepgen.00.maxvel [AXIS_0]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net x-pos-cmd <= axis.0.motor-pos-cmd
net x-vel-cmd <= axis.0.joint-vel-cmd
net x-output => hm2_5i25.0.stepgen.00.velocity-cmd
net x-pos-fb <= hm2_5i25.0.stepgen.00.position-fb
net x-pos-fb => axis.0.motor-pos-fb
net x-enable <= axis.0.amp-enable-out
net x-enable => hm2_5i25.0.stepgen.00.enable
# ---setup home / limit switch signals---
net home-x => axis.0.home-sw-in
net x-neg-limit => axis.0.neg-lim-sw-in
net x-pos-limit => axis.0.pos-lim-sw-in
#*******************
# AXIS Y
#*******************
setp pid.y.Pgain [AXIS_1]P
setp pid.y.Igain [AXIS_1]I
setp pid.y.Dgain [AXIS_1]D
setp pid.y.bias [AXIS_1]BIAS
setp pid.y.FF0 [AXIS_1]FF0
setp pid.y.FF1 [AXIS_1]FF1
setp pid.y.FF2 [AXIS_1]FF2
setp pid.y.deadband [AXIS_1]DEADBAND
setp pid.y.maxoutput [AXIS_1]MAX_OUTPUT
setp pid.y.error-previous-target true
setp pid.y.maxerror .0005
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-vel-cmd => pid.y.command-deriv
net y-pos-fb => pid.y.feedback
net y-output => pid.y.output
# Step Gen signals/setup
setp hm2_5i25.0.stepgen.01.dirsetup [AXIS_1]DIRSETUP
setp hm2_5i25.0.stepgen.01.dirhold [AXIS_1]DIRHOLD
setp hm2_5i25.0.stepgen.01.steplen [AXIS_1]STEPLEN
setp hm2_5i25.0.stepgen.01.stepspace [AXIS_1]STEPSPACE
setp hm2_5i25.0.stepgen.01.position-scale [AXIS_1]STEP_SCALE
setp hm2_5i25.0.stepgen.01.step_type 0
setp hm2_5i25.0.stepgen.01.control-type 1
setp hm2_5i25.0.stepgen.01.maxaccel [AXIS_1]STEPGEN_MAXACCEL
setp hm2_5i25.0.stepgen.01.maxvel [AXIS_1]STEPGEN_MAXVEL
# ---closedloop stepper signals---
net y-pos-cmd <= axis.1.motor-pos-cmd
net y-vel-cmd <= axis.1.joint-vel-cmd
net y-output => hm2_5i25.0.stepgen.01.velocity-cmd
net y-pos-fb <= hm2_5i25.0.stepgen.01.position-fb
net y-pos-fb => axis.1.motor-pos-fb
net y-enable <= axis.1.amp-enable-out
net y-enable => hm2_5i25.0.stepgen.01.enable
# ---setup home / limit switch signals---
net home-y => axis.1.home-sw-in
net y-neg-limit => axis.1.neg-lim-sw-in
net y-pos-limit => axis.1.pos-lim-sw-in
#*******************
# AXIS Z
#*******************
setp pid.z.Pgain [AXIS_2]P
setp pid.z.Igain [AXIS_2]I
setp pid.z.Dgain [AXIS_2]D
setp pid.z.bias [AXIS_2]BIAS
setp pid.z.FF0 [AXIS_2]FF0
setp pid.z.FF1 [AXIS_2]FF1
setp pid.z.FF2 [AXIS_2]FF2
setp pid.z.deadband [AXIS_2]DEADBAND
setp pid.z.maxoutput [AXIS_2]MAX_OUTPUT
setp pid.z.error-previous-target true
setp pid.z.maxerror .0005
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-vel-cmd => pid.z.command-deriv
net z-pos-fb => pid.z.feedback
net z-output => pid.z.output
# Step Gen signals/setup
setp hm2_5i25.0.stepgen.02.dirsetup [AXIS_2]DIRSETUP
setp hm2_5i25.0.stepgen.02.dirhold [AXIS_2]DIRHOLD
setp hm2_5i25.0.stepgen.02.steplen [AXIS_2]STEPLEN
setp hm2_5i25.0.stepgen.02.stepspace [AXIS_2]STEPSPACE
setp hm2_5i25.0.stepgen.02.position-scale [AXIS_2]STEP_SCALE
setp hm2_5i25.0.stepgen.02.step_type 0
setp hm2_5i25.0.stepgen.02.control-type 1
setp hm2_5i25.0.stepgen.02.maxaccel [AXIS_2]STEPGEN_MAXACCEL
setp hm2_5i25.0.stepgen.02.maxvel [AXIS_2]STEPGEN_MAXVEL
setp hm2_5i25.0.gpio.004.invert_output true
# ---closedloop stepper signals---
net z-pos-cmd <= axis.2.motor-pos-cmd
net z-vel-cmd <= axis.2.joint-vel-cmd
net z-output => hm2_5i25.0.stepgen.02.velocity-cmd
net z-pos-fb <= hm2_5i25.0.stepgen.02.position-fb
net z-pos-fb => axis.2.motor-pos-fb
net z-enable <= axis.2.amp-enable-out
net z-enable => hm2_5i25.0.stepgen.02.enable
# ---setup home / limit switch signals---
net home-z => axis.2.home-sw-in
net z-neg-limit => axis.2.neg-lim-sw-in
net z-pos-limit => axis.2.pos-lim-sw-in
#*******************
# SPINDLE S
#*******************
setp pid.s.Pgain [SPINDLE_9]P
setp pid.s.Igain [SPINDLE_9]I
setp pid.s.Dgain [SPINDLE_9]D
setp pid.s.bias [SPINDLE_9]BIAS
setp pid.s.FF0 [SPINDLE_9]FF0
setp pid.s.FF1 [SPINDLE_9]FF1
setp pid.s.FF2 [SPINDLE_9]FF2
setp pid.s.deadband [SPINDLE_9]DEADBAND
setp pid.s.maxoutput [SPINDLE_9]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-output <= pid.s.output
# ---digital potentionmeter output signals/setup---
setp hm2_5i25.0.7i76.0.0.spinout-minlim [SPINDLE_9]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i76.0.0.spinout-maxlim [SPINDLE_9]OUTPUT_MAX_LIMIT
setp hm2_5i25.0.7i76.0.0.spinout-scalemax [SPINDLE_9]OUTPUT_SCALE
net spindle-output => hm2_5i25.0.7i76.0.0.spinout
net spindle-enable => hm2_5i25.0.7i76.0.0.spinena
net spindle-ccw => hm2_5i25.0.7i76.0.0.spindir
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= motion.spindle-speed-out-rps
net spindle-vel-cmd-rps-abs <= motion.spindle-speed-out-rps-abs
net spindle-vel-cmd-rpm <= motion.spindle-speed-out
net spindle-vel-cmd-rpm-abs <= motion.spindle-speed-out-abs
net spindle-enable <= motion.spindle-on
net spindle-cw <= motion.spindle-forward
net spindle-ccw <= motion.spindle-reverse
net spindle-brake <= motion.spindle-brake
net spindle-revs => motion.spindle-revs
net spindle-at-speed => motion.spindle-at-speed
net spindle-vel-fb-rps => motion.spindle-speed-in
net spindle-index-enable <=> motion.spindle-index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net joint-select-a halui.joint.0.select
net x-is-homed halui.joint.0.is-homed
net jog-x-pos halui.jog.0.plus
net jog-x-neg halui.jog.0.minus
net jog-x-analog halui.jog.0.analog
net joint-select-b halui.joint.1.select
net y-is-homed halui.joint.1.is-homed
net jog-y-pos halui.jog.1.plus
net jog-y-neg halui.jog.1.minus
net jog-y-analog halui.jog.1.analog
net joint-select-c halui.joint.2.select
net z-is-homed halui.joint.2.is-homed
net jog-z-pos halui.jog.2.plus
net jog-z-neg halui.jog.2.minus
net jog-z-analog halui.jog.2.analog
net jog-selected-pos halui.jog.selected.plus
net jog-selected-neg halui.jog.selected.minus
net spindle-manual-cw halui.spindle.forward
net spindle-manual-ccw halui.spindle.reverse
net spindle-manual-stop halui.spindle.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---jogwheel signals to mesa encoder - shared MPG---
net joint-selected-count <= hm2_5i25.0.encoder.00.count
# ---mpg signals---
# for axis x MPG
setp axis.0.jog-vel-mode 0
net selected-jog-incr => axis.0.jog-scale
net joint-select-a => axis.0.jog-enable
net joint-selected-count => axis.0.jog-counts
# for axis y MPG
setp axis.1.jog-vel-mode 0
net selected-jog-incr => axis.1.jog-scale
net joint-select-b => axis.1.jog-enable
net joint-selected-count => axis.1.jog-counts
# for axis z MPG
setp axis.2.jog-vel-mode 0
net selected-jog-incr => axis.2.jog-scale
net joint-select-c => axis.2.jog-enable
net joint-selected-count => axis.2.jog-counts
# connect selectable mpg jog increments
net jog-incr-a => jogincr.sel0
net jog-incr-b => jogincr.sel1
net jog-incr-c => jogincr.sel2
net jog-incr-d => jogincr.sel3
net selected-jog-incr <= jogincr.out-f
setp jogincr.debounce-time 0.200000
setp jogincr.use-graycode False
setp jogincr.suppress-no-input False
setp jogincr.in00 0.000000
setp jogincr.in01 0.001000
setp jogincr.in02 0.010000
setp jogincr.in03 0.100000
setp jogincr.in04 0.005000
setp jogincr.in05 0.010000
setp jogincr.in06 0.050000
setp jogincr.in07 0.100000
setp jogincr.in08 0.125000
setp jogincr.in09 0.125000
setp jogincr.in10 0.125000
setp jogincr.in11 0.125000
setp jogincr.in12 0.125000
setp jogincr.in13 0.125000
setp jogincr.in14 0.125000
setp jogincr.in15 0.125000
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-preparedHe did connect the MPG to TB5 Pin 1 and Pin 2, as i did also for one MPG handwheel. But no where in the HAL i can find something like "input 16" and "input 17".
Guys, i dont wanna cry, but i dont get it done by my self. No chance. I know that this is not your problem and you are helping here for free, but since i have got the Mesa 7i76e i have spend about 24 hours to get things done and from the 24h a spend at least 10 hours, just to get the Handwheels connected and setup, but with no positive result. I am currently really thinking to give up and sell the 7i76e, forget about the mpg handwheels and just use a cheap BOB which i know that i will be able to setup.
Another option is that someone does the work for me and i pay for that. There are nicer things to do then trying something without any clue about it.
Please Log in or Create an account to join the conversation.
- Mike_Eitel
-
- Offline
- Platinum Member
-
- Posts: 1052
- Thank you received: 183
code inserts
########################################
# 7i73 hal connections for the MPG #
# (c) Norbert Schechner #
# modified by Mike Eitel #
########################################
### DECLARATION OF USED COMPONENTS ###
loadrt ilowpass names=lowpass-x,lowpass-y,lowpass-z,lowpass-a
loadrt mux4 names=jog-scale-xy,jog-scale-z,jog-scale-a
### STARTING OF USED COMPONENTS ###
addf lowpass-x servo-thread
addf lowpass-y servo-thread
addf lowpass-z servo-thread
addf lowpass-a servo-thread
addf jog-scale-xy servo-thread
addf jog-scale-z servo-thread
addf jog-scale-a servo-thread
### DEFINITION OF CONSTANTS ###
# For velocity mode, set to 1
# In velocity mode the axis stops when the dial is stopped even if that means
# the commanded motion is not completed. For position mode (the default), set to 0
# In position mode the axis will move exactly jog-scale
# units for each count, regardless of how long that might take,
setp axis.x.jog-vel-mode 0
setp axis.y.jog-vel-mode 0
setp axis.z.jog-vel-mode 0
setp axis.a.jog-vel-mode 0
setp joint.0.jog-vel-mode 0
setp joint.1.jog-vel-mode 0
setp joint.2.jog-vel-mode 0
setp joint.3.jog-vel-mode 0
# Make the movements smother by avoiding big jumps
setp lowpass-x.scale 1
setp lowpass-x.gain 0.01
setp lowpass-y.scale 1
setp lowpass-y.gain 0.0075
setp lowpass-z.scale 1
setp lowpass-z.gain 0.0050
setp lowpass-a.scale 1
setp lowpass-a.gain 0.0025
# This sets the scale that will be used based on the input to the mux4
# The scale used here has to be multiplied by the ilowpass scale
# X an Y are using the same scale factors
setp jog-scale-xy.in0 1.000
setp jog-scale-xy.in1 0.100
setp jog-scale-xy.in2 0.010
setp jog-scale-xy.in3 0.001
#Z ist normal spindel axis
setp jog-scale-z.in0 1.000
setp jog-scale-z.in1 0.100
setp jog-scale-z.in2 0.010
setp jog-scale-z.in3 0.001
#A is a rotating axis !
setp jog-scale-a.in0 15.0
setp jog-scale-a.in1 3.6
setp jog-scale-a.in2 1.0
setp jog-scale-a.in3 0.1
### IMPLEMENTATION OF HAL CONNECTIONS ###
# X an Y are using the same scale factors
# The selector inputs of the mux4 component are connected with the hw switches
net scale-xy1 jog-scale-xy.sel0 <= hm2_7i76e.0.7i73.0.1.input-18-not
net scale-xy2 jog-scale-xy.sel1 <= hm2_7i76e.0.7i73.0.1.input-19-not
net scale-z1 jog-scale-z.sel0 <= hm2_7i76e.0.7i73.0.1.input-20-not
net scale-z2 jog-scale-z.sel1 <= hm2_7i76e.0.7i73.0.1.input-21-not
net scale-a1 jog-scale-a.sel0 <= hm2_7i76e.0.7i73.0.1.input-22-not
net scale-a2 jog-scale-a.sel1 <= hm2_7i76e.0.7i73.0.1.input-23-not
# This sets the scale that will be used based on the input of the mux4
# The output from the mux4 is sent to each axis jog scale
net mpg-scale-xy jog-scale-xy.out => axis.x.jog-scale => joint.0.jog-scale
net mpg-scale-xy => axis.y.jog-scale => joint.1.jog-scale
net mpg-scale-z jog-scale-z.out => axis.z.jog-scale => joint.2.jog-scale
net mpg-scale-a jog-scale-a.out => axis.a.jog-scale => joint.3.jog-scale
# Connecting of encoder hw outputs to hal
# The output from encoder counts is sent to ilowpass
net jog-wheel-counts-x lowpass-x.in <= hm2_7i76e.0.7i73.0.1.enc0.count
net jog-wheel-counts-y lowpass-y.in <= hm2_7i76e.0.7i73.0.1.enc1.count
net jog-wheel-counts-z lowpass-z.in <= hm2_7i76e.0.7i73.0.1.enc2.count
net jog-wheel-counts-a lowpass-a.in <= hm2_7i76e.0.7i73.0.1.enc3.count
net jog-wheel-counts-x => joint.0.jog-counts => axis.x.jog-counts
net jog-wheel-counts-y => joint.1.jog-counts => axis.y.jog-counts
net jog-wheel-counts-z => joint.2.jog-counts => axis.z.jog-counts
net jog-wheel-counts-a => joint.3.jog-counts => axis.a.jog-counts
# already connected cont_joging on jog vel mode selection
# net jog_cont gmoccapy.jog.jog-inc-0 <= hm2_7i76e.0.7i73.0.1.input-07
#net jog_1000 gmoccapy.jog.jog-inc-1 <= hm2_7i76e.0.7i73.0.1.input-06
#net jog_0100 gmoccapy.jog.jog-inc-2 <= hm2_7i76e.0.7i73.0.1.input-05
#net jog_0010 gmoccapy.jog.jog-inc-3 <= hm2_7i76e.0.7i73.0.1.input-04
#net jog_0001 gmoccapy.jog.jog-inc-4 <= hm2_7i76e.0.7i73.0.1.input-03
# loaded at estop_and_enable.hal
#loadrt and2 names=and_x,and_y,and_z
#addf and_x servo-thread
#addf and_y servo-thread
#addf and_z servo-thread
#addf and_a servo-thread
net jog-enable <= halui.machine.is-on
net jog-enable => joint.0.jog-enable => axis.x.jog-enable
net jog-enable => joint.1.jog-enable => axis.y.jog-enable
net jog-enable => joint.2.jog-enable => axis.z.jog-enable
net jog-enable => joint.3.jog-enable => axis.a.jog-enable
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
- Posts: 21700
- Thank you received: 7417
Tomorrow is Sunday, so grab a coffee and a smoke and a chair, we'll give it a go at a slower pace.
")
Please Log in or Create an account to join the conversation.