Lathe Macros
- hitchhiker
- Offline
- Elite Member
-

Less
More
- Posts: 221
- Thank you received: 19
22 Nov 2022 22:14 #257388
by hitchhiker
Replied by hitchhiker on topic Lathe Macros
i think the problem is thst i use nativecam and lathe macros... could this be a problem?? on linuxcnc 2.8...?! lathemacros version 1...
Please Log in or Create an account to join the conversation.
- andypugh
-
 Topic Author
Topic Author
- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
22 Nov 2022 23:08 #257392
by andypugh
Replied by andypugh on topic Lathe Macros
That shouldn't be a problem.
Are you saying that you have to (for example) load "turning.ngc" before the "turning" tab will work?
If so, that points to turning.ngc not being in the search path. So, where did you put the .ngc files and what is yout SUBROUTINE_PATH in the INI file?
Are you saying that you have to (for example) load "turning.ngc" before the "turning" tab will work?
If so, that points to turning.ngc not being in the search path. So, where did you put the .ngc files and what is yout SUBROUTINE_PATH in the INI file?
The following user(s) said Thank You: Masiwood123
Please Log in or Create an account to join the conversation.
- hitchhiker
- Offline
- Elite Member
-
Less
More
- Posts: 221
- Thank you received: 19
22 Nov 2022 23:20 #257396
by hitchhiker
Replied by hitchhiker on topic Lathe Macros
i will check it tomorrow and send screenshots!
in the last days i come to the end with wiring my 6i25 to my lathe.. now i testing with cuts in the air...
tomorrow i make screenshots... do you know if the fusion 360 lathe pp works out of the box???
thanks
in the last days i come to the end with wiring my 6i25 to my lathe.. now i testing with cuts in the air...
tomorrow i make screenshots... do you know if the fusion 360 lathe pp works out of the box???
thanks
Please Log in or Create an account to join the conversation.
- andypugh
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
22 Nov 2022 23:39 #257403
by andypugh
Replied by andypugh on topic Lathe Macros
I think I modified the lathe PP from Fusion. This is straight from my machine.
The following user(s) said Thank You: Masiwood123
Please Log in or Create an account to join the conversation.
- hitchhiker
- Offline
- Elite Member
-
Less
More
- Posts: 221
- Thank you received: 19
23 Nov 2022 07:15 #257432
by hitchhiker
Replied by hitchhiker on topic Lathe Macros
ok!i have a old emco compact 5 cnc with turret... i look to the fusion website and found the lstest postprocessor was modified arround 40 days ago.
tonight i will check something.. then i make the screenshots...
the way away from mach3 is nomore far")
thanks
tonight i will check something.. then i make the screenshots...
the way away from mach3 is nomore far
thanks
Please Log in or Create an account to join the conversation.
- Muzzer
- Offline
- Elite Member
-
Less
More
- Posts: 266
- Thank you received: 42
02 Jan 2023 18:26 #260782
by Muzzer
Replied by Muzzer on topic Lathe Macros
Just had another go at updating gmoccapy using the V3.0 files, by pasting the EMBED_TAB_COMMAND line into the HAL file and overwriting the ngc files. I still get the same result:
- No obvious means of generating or running the resulting g code.
- If I click on a scroll box before closing a previous (different) one, the keypad gets lost behind the main window somewhere. I can find it again by using alt-tab to switch windows.
Can anyone see the obvious mistake(s)? I've attached my INI file and a screenshot
Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
02 Jan 2023 19:00 #260784
by andypugh
Replied by andypugh on topic Lathe Macros
Which LinuxCNC version and OS?
It looks like the last-bu-one version of the macros? I have forgotten what it takes to get the run button to show.
It looks like the last-bu-one version of the macros? I have forgotten what it takes to get the run button to show.
Please Log in or Create an account to join the conversation.
- Muzzer
- Offline
- Elite Member
-
Less
More
- Posts: 266
- Thank you received: 42
02 Jan 2023 19:54 - 02 Jan 2023 19:55 #260793
by Muzzer
Replied by Muzzer on topic Lathe Macros
I'm using Mint 20 and 2.8. I downloaded V3 from your github today.
Last edit: 02 Jan 2023 19:55 by Muzzer.
Please Log in or Create an account to join the conversation.
- virencq
- Offline
- Premium Member
-

Less
More
- Posts: 89
- Thank you received: 5
04 Jan 2023 10:42 #260912
by virencq
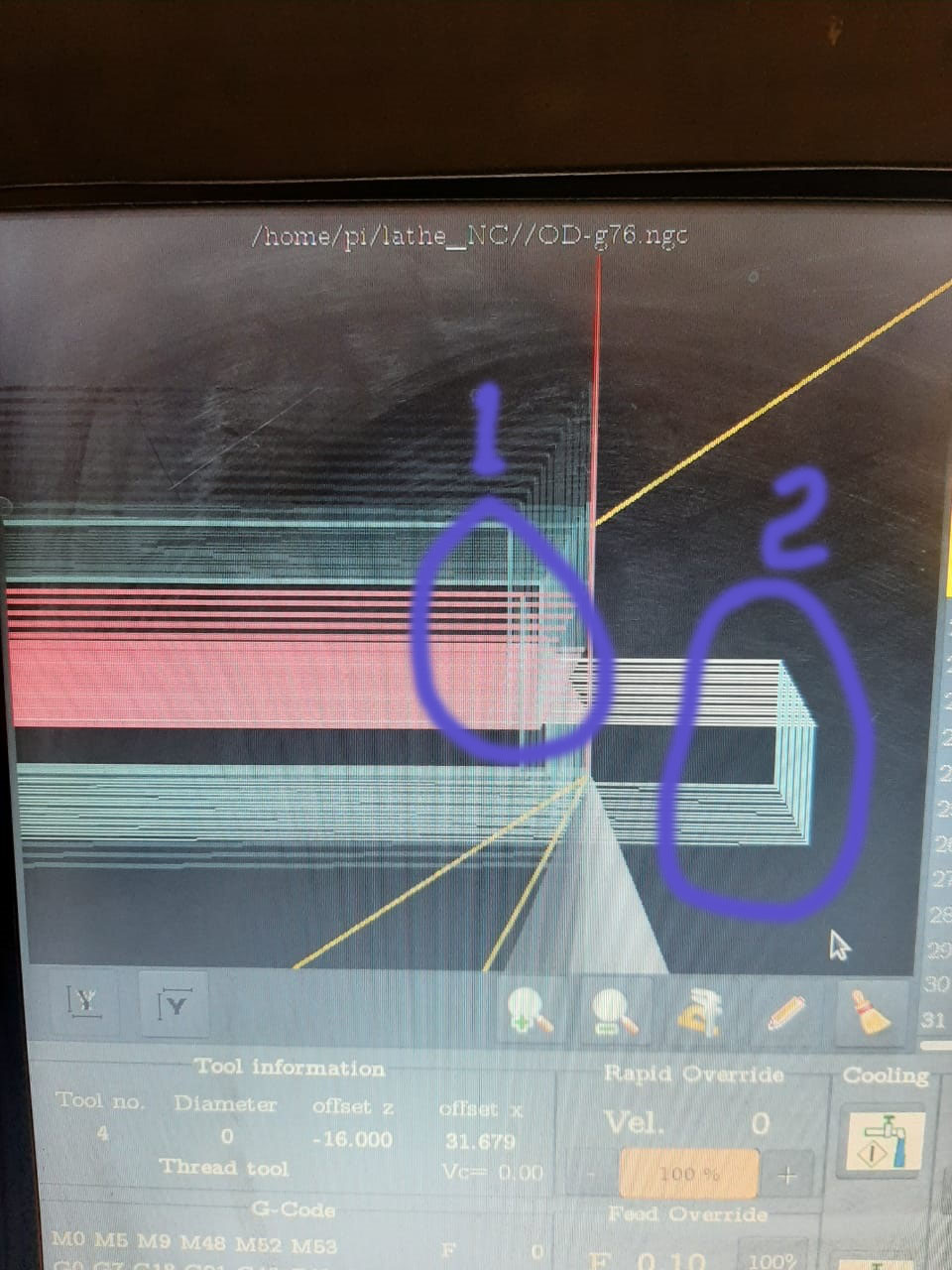
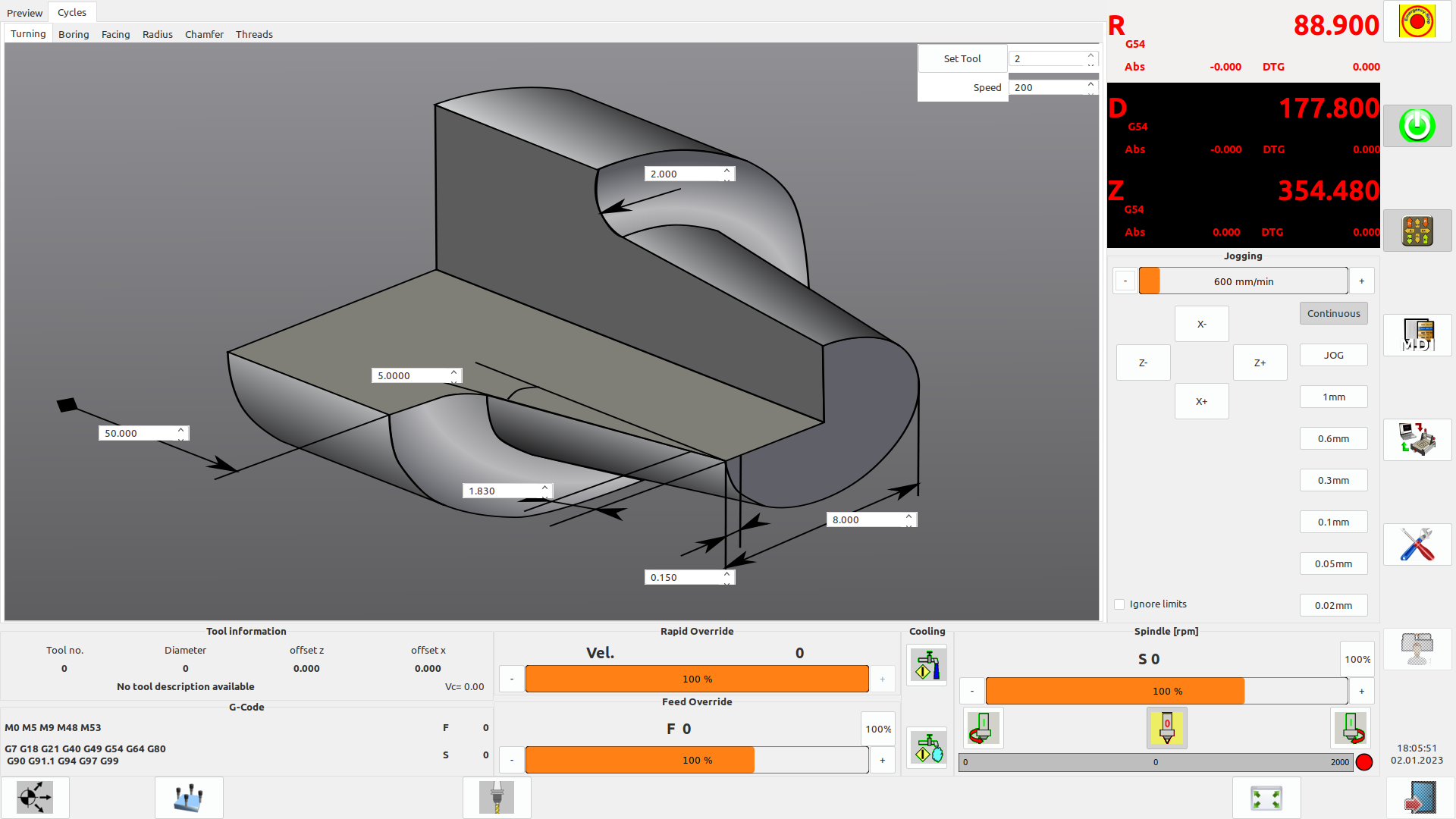
I am using Lathe macro version 1.
From the picture attached 1 represents threading macro external and internal. Dia 18.5 mm and pitch 2 mm.
Picture 2 represents OD-g76.ngc tool path, it also has same 18.5 mm dia, 2 mm pitch.
both versions have huge differences in depth, what I am doing wrong...........
Replied by virencq on topic Lathe Macros
I am using Lathe macro version 1.
From the picture attached 1 represents threading macro external and internal. Dia 18.5 mm and pitch 2 mm.
Picture 2 represents OD-g76.ngc tool path, it also has same 18.5 mm dia, 2 mm pitch.
both versions have huge differences in depth, what I am doing wrong...........
Attachments:
Please Log in or Create an account to join the conversation.
- Henk
- Offline
- Platinum Member
-

Less
More
- Posts: 408
- Thank you received: 92
08 Jan 2023 09:33 #261248
by Henk
Replied by Henk on topic Lathe Macros
HI
I can seem to get past this error when setting up lathe macros on my lathe.
I copied all the files from V2.0 into the same dir as my .ini file. Edited the ini file, added lines
EMBED_TAB_NAME=Cycles
EMBED_TAB_COMMAND=halcmd loadusr -Wn gladevcp gladevcp -c gladevcp -u lathehandler.py -x {XID} -g 300x200+0+0 lathemacro.ui
and i get this error when starting from terminal
Glade is installed and gladevcp widgets can be seen in glade. version is 3.8.6
Any idea what im doing wrong?
I can seem to get past this error when setting up lathe macros on my lathe.
I copied all the files from V2.0 into the same dir as my .ini file. Edited the ini file, added lines
EMBED_TAB_NAME=Cycles
EMBED_TAB_COMMAND=halcmd loadusr -Wn gladevcp gladevcp -c gladevcp -u lathehandler.py -x {XID} -g 300x200+0+0 lathemacro.ui
and i get this error when starting from terminal
Glade is installed and gladevcp widgets can be seen in glade. version is 3.8.6
Any idea what im doing wrong?
linuxcnc@linuxcnc:~/linuxcnc/configs/CTX400E with macros$ halcmd sets spindle-engage 0
<commandline>:0: signal 'spindle-engage' not found
linuxcnc@linuxcnc:~/linuxcnc/configs/CTX400E with macros$ linuxcnc CTX400E.ini
LINUXCNC - 2.8.3
/usr/bin/linuxcnc: line 290: cd: $'/home/linuxcnc/linuxcnc/configs\n.\nmacros': No such file or directory
Machine configuration directory is '/home/linuxcnc/linuxcnc/configs/CTX400E with macros'
Machine configuration file is 'CTX400E.ini'
Starting LinuxCNC...
Found file(REL): ./CTX400E.hal
Note: Using POSIX realtime
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 10.10.10.10: INFO: Hardware address (MAC): 00:60:1b:10:00:51
hm2_eth: discovered 7I80DB-16
hm2/hm2_7i80.0: Low Level init 0.15
hm2/hm2_7i80.0: Smart Serial Firmware Version 43
Board hm2_7i80.0.7i77.0.0 Hardware Mode 0 = standard
Board hm2_7i80.0.7i77.0.0 Software Mode 0 = input_output
Board hm2_7i80.0.7i77.0.0 Software Mode 1 = io_analog
Board hm2_7i80.0.7i77.0.0 Software Mode 2 = io_analog_fieldvoltage
Board hm2_7i80.0.7i77.0.0 Software Mode 3 = io_encoder_analog_fieldvoltage
Board hm2_7i80.0.7i77.0.1 Hardware Mode 0 = standard
Board hm2_7i80.0.7i77.0.1 Software Mode 0 = analogout_enables
Board hm2_7i80.0.7i71.0.2 Hardware Mode 0 = standard
Board hm2_7i80.0.7i71.0.2 Software Mode 0 = output_only
Board hm2_7i80.0.7i71.0.2 Software Mode 1 = output_fieldvoltage
Waiting for component 'hm2_eth' to become ready...hm2/hm2_7i80.0: Smart Serial Firmware Version 43
.Board hm2_7i80.0.7i70.1.0 Hardware Mode 0 = standard
Board hm2_7i80.0.7i70.1.0 Software Mode 0 = input_only
Board hm2_7i80.0.7i70.1.0 Software Mode 1 = input_analog
.Board hm2_7i80.0.7i70.1.0 Software Mode 2 = input_fieldvoltage
....hm2/hm2_7i80.0: 68 I/O Pins used:
hm2/hm2_7i80.0: IO Pin 000 (J2-01): Smart Serial Interface #0, pin txen2 (Output)
hm2/hm2_7i80.0: IO Pin 001 (J2-14): Smart Serial Interface #0, pin tx2 (Output)
hm2/hm2_7i80.0: IO Pin 002 (J2-02): Smart Serial Interface #0, pin rx2 (Input)
hm2/hm2_7i80.0: IO Pin 003 (J2-15): Smart Serial Interface #0, pin tx1 (Output)
hm2/hm2_7i80.0: IO Pin 004 (J2-03): Smart Serial Interface #0, pin rx1 (Input)
hm2/hm2_7i80.0: IO Pin 005 (J2-16): Smart Serial Interface #0, pin tx0 (Output)
hm2/hm2_7i80.0: IO Pin 006 (J2-04): Smart Serial Interface #0, pin rx0 (Input)
hm2/hm2_7i80.0: IO Pin 007 (J2-17): Muxed Encoder Select #0, pin Mux Select 0 (Output)
hm2/hm2_7i80.0: IO Pin 008 (J2-05): Muxed Encoder #0, pin Muxed A (Input)
hm2/hm2_7i80.0: IO Pin 009 (J2-06): Muxed Encoder #0, pin Muxed B (Input)
hm2/hm2_7i80.0: IO Pin 010 (J2-07): Muxed Encoder #0, pin Muxed Index (Input)
hm2/hm2_7i80.0: IO Pin 011 (J2-08): Muxed Encoder #1, pin Muxed A (Input)
hm2/hm2_7i80.0: IO Pin 012 (J2-09): Muxed Encoder #1, pin Muxed B (Input)
hm2/hm2_7i80.0: IO Pin 013 (J2-10): Muxed Encoder #1, pin Muxed Index (Input)
hm2/hm2_7i80.0: IO Pin 014 (J2-11): Muxed Encoder #2, pin Muxed A (Input)
hm2/hm2_7i80.0: IO Pin 015 (J2-12): Muxed Encoder #2, pin Muxed B (Input)
hm2/hm2_7i80.0: IO Pin 016 (J2-13): Muxed Encoder #2, pin Muxed Index (Input)
hm2/hm2_7i80.0: IO Pin 017 (J3-01): IOPort
hm2/hm2_7i80.0: IO Pin 018 (J3-14): IOPort
hm2/hm2_7i80.0: IO Pin 019 (J3-02): IOPort
hm2/hm2_7i80.0: IO Pin 020 (J3-15): IOPort
hm2/hm2_7i80.0: IO Pin 021 (J3-03): IOPort
hm2/hm2_7i80.0: IO Pin 022 (J3-16): IOPort
hm2/hm2_7i80.0: IO Pin 023 (J3-04): IOPort
hm2/hm2_7i80.0: IO Pin 024 (J3-17): IOPort
hm2/hm2_7i80.0: IO Pin 025 (J3-05): IOPort
hm2/hm2_7i80.0: IO Pin 026 (J3-06): IOPort
hm2/hm2_7i80.0: IO Pin 027 (J3-07): Muxed Encoder Select #6, pin Mux Select 0 (Output)
hm2/hm2_7i80.0: IO Pin 028 (J3-08): Muxed Encoder #3, pin Muxed A (Input)
hm2/hm2_7i80.0: IO Pin 029 (J3-09): Muxed Encoder #3, pin Muxed B (Input)
hm2/hm2_7i80.0: IO Pin 030 (J3-10): Muxed Encoder #3, pin Muxed Index (Input)
hm2/hm2_7i80.0: IO Pin 031 (J3-11): Muxed Encoder #4, pin Muxed A (Input)
hm2/hm2_7i80.0: IO Pin 032 (J3-12): Muxed Encoder #4, pin Muxed B (Input)
hm2/hm2_7i80.0: IO Pin 033 (J3-13): Muxed Encoder #4, pin Muxed Index (Input)
hm2/hm2_7i80.0: IO Pin 034 (J4-01): StepGen #0, pin Direction (Output)
hm2/hm2_7i80.0: IO Pin 035 (J4-14): StepGen #0, pin Step (Output)
hm2/hm2_7i80.0: IO Pin 036 (J4-02): StepGen #1, pin Direction (Output)
hm2/hm2_7i80.0: IO Pin 037 (J4-15): StepGen #1, pin Step (Output)
hm2/hm2_7i80.0: IO Pin 038 (J4-03): StepGen #2, pin Direction (Output)
hm2/hm2_7i80.0: IO Pin 039 (J4-16): StepGen #2, pin Step (Output)
hm2/hm2_7i80.0: IO Pin 040 (J4-04): StepGen #3, pin Direction (Output)
hm2/hm2_7i80.0: IO Pin 041 (J4-17): StepGen #3, pin Step (Output)
hm2/hm2_7i80.0: IO Pin 042 (J4-05): IOPort
hm2/hm2_7i80.0: IO Pin 043 (J4-06): IOPort
hm2/hm2_7i80.0: IO Pin 044 (J4-07): IOPort
hm2/hm2_7i80.0: IO Pin 045 (J4-08): Smart Serial Interface #1, pin tx0 (Output)
hm2/hm2_7i80.0: IO Pin 046 (J4-09): Smart Serial Interface #1, pin txen0 (Output)
hm2/hm2_7i80.0: IO Pin 047 (J4-10): Smart Serial Interface #1, pin rx0 (Input)
hm2/hm2_7i80.0: IO Pin 048 (J4-11): Muxed Encoder #5, pin Muxed Index (Input)
hm2/hm2_7i80.0: IO Pin 049 (J4-12): Muxed Encoder #5, pin Muxed B (Input)
hm2/hm2_7i80.0: IO Pin 050 (J4-13): Muxed Encoder #5, pin Muxed A (Input)
hm2/hm2_7i80.0: IO Pin 051 (J5-01): IOPort
hm2/hm2_7i80.0: IO Pin 052 (J5-14): IOPort
hm2/hm2_7i80.0: IO Pin 053 (J5-02): IOPort
hm2/hm2_7i80.0: IO Pin 054 (J5-15): IOPort
hm2/hm2_7i80.0: IO Pin 055 (J5-03): IOPort
hm2/hm2_7i80.0: IO Pin 056 (J5-16): IOPort
hm2/hm2_7i80.0: IO Pin 057 (J5-04): IOPort
hm2/hm2_7i80.0: IO Pin 058 (J5-17): IOPort
hm2/hm2_7i80.0: IO Pin 059 (J5-05): IOPort
hm2/hm2_7i80.0: IO Pin 060 (J5-06): IOPort
hm2/hm2_7i80.0: IO Pin 061 (J5-07): IOPort
hm2/hm2_7i80.0: IO Pin 062 (J5-08): IOPort
hm2/hm2_7i80.0: IO Pin 063 (J5-09): IOPort
hm2/hm2_7i80.0: IO Pin 064 (J5-10): IOPort
hm2/hm2_7i80.0: IO Pin 065 (J5-11): IOPort
hm2/hm2_7i80.0: IO Pin 066 (J5-12): IOPort
hm2/hm2_7i80.0: IO Pin 067 (J5-13): IOPort
hm2/hm2_7i80.0: registered
creating ladder-state
Found file(REL): ./custom.hal
INFO CLASSICLADDER- No ladder GUI requested-Realtime runs till HAL closes.
Found file(REL): ./atc-spindle2.hal
Found file(REL): ./c0-spindle-vel.hal
Found file(REL): ./c1-spindle-vel.hal
Found file(REL): ./hydraulics-and-io.hal
Found file(REL): ./CTX400E-panel.hal
note: MAXV max: 167.000 units/sec 10020.000 units/min
note: LJOG max: 167.000 units/sec 10020.000 units/min
note: LJOG default: 100.000 units/sec 6000.000 units/min
note: AJOG max: 180.000 units/sec 10800.000 units/min
note: AJOG default: 50.000 units/sec 3000.000 units/min
waiting for s.joints<0>, s.kinematics_type<0>
waiting for s.joints<0>, s.kinematics_type<0>
waiting for s.joints<0>, s.kinematics_type<0>
waiting for s.joints<0>, s.kinematics_type<0>
waiting for s.joints<0>, s.kinematics_type<0>
interp __init__ 1 7011
note: jog_order='ZXCW'
note: jog_invert=set([])
interp __init__ 0 7014
/usr/bin/gladevcp:191: GtkWarning: Attempting to add a widget with type GtkImage to a GtkButton, but as a GtkBin subclass a GtkButton can only contain one widget at a time; it already contains a widget of type GtkLabel
builder.add_from_file(xmlname)
HAL: ERROR: insufficient memory for pin 'gladevcp.chamfer.sf-f'
Traceback (most recent call last):
File "/usr/bin/gladevcp", line 347, in <module>
main()
File "/usr/bin/gladevcp", line 213, in main
panel = gladevcp.makepins.GladePanel( halcomp, xmlname, builder, None)
File "/usr/lib/python2.7/dist-packages/gladevcp/makepins.py", line 52, in __init__
widget.hal_init(self.hal, idname, self)
File "/usr/lib/python2.7/dist-packages/gladevcp/hal_widgets.py", line 28, in hal_init
self._hal_init()
File "/usr/lib/python2.7/dist-packages/gladevcp/hal_widgets.py", line 219, in _hal_init
self.hal_pin_f = self.hal.newpin(self.hal_name+"-f", hal.HAL_FLOAT, hal.HAL_OUT)
File "/usr/lib/python2.7/dist-packages/hal_glib.py", line 72, in newpin
def newpin(self, *a, **kw): return GPin(_hal.component.newpin(self.comp, *a, **kw))
hal.error: Cannot allocate memory
<commandline>:0: waitpid failed gladevcp gladevcp
<commandline>:0: gladevcp exited without becoming ready
Embeded tab command "halcmd loadusr -Wn gladevcp gladevcp -c gladevcp -u lathehandler.py -x 48234924 -g 300x200+0+0 lathemacro.ui" exited with error: 1
Shutting down and cleaning up LinuxCNC...
Running HAL shutdown script
task: 106 cycles, min=0.000037, max=0.037753, avg=0.007759, 0 latency excursions (> 10x expected cycle time of 0.010000s)
interp __delete__ 1 7011
hm2_eth: in hm2_eth_reset
hm2_eth: HostMot2 ethernet driver unloaded
hm2: unloading
Note: Using POSIX realtime
LinuxCNC terminated with an error. You can find more information in the log:
/home/linuxcnc/linuxcnc_debug.txt
and
/home/linuxcnc/linuxcnc_print.txt
as well as in the output of the shell command 'dmesg' and in the terminal
linuxcnc@linuxcnc:~/linuxcnc/configs/CTX400E with macros$
Please Log in or Create an account to join the conversation.
Time to create page: 0.235 seconds