Mitsubishi SSCNET
- dm17ry
-
- Offline
- Elite Member
-

Less
More
- Posts: 203
- Thank you received: 88
12 Jul 2024 13:03 #304992
by dm17ry
Replied by dm17ry on topic Mitsubishi SSCNET
found a meldas 300 controller with most of the parts. got it working and initializing a MR-S11 drive. hooked up a logic analyzer and it looks fairly straight forward... next, i need to get the motor spinning and rig up some kind of an interface board...
The following user(s) said Thank You: NWE
Please Log in or Create an account to join the conversation.
- dm17ry
-
- Offline
- Elite Member
-
Less
More
- Posts: 203
- Thank you received: 88
28 Apr 2025 11:26 #327211
by dm17ry
Replied by dm17ry on topic Mitsubishi SSCNET
finally got the thing spinning with with my new hardware
Attachments:
The following user(s) said Thank You: tommylight, besriworld, COFHAL, Aciera, jochen91, my1987toyota, NWE
Please Log in or Create an account to join the conversation.
- MRx
- Offline
- Senior Member
-

Less
More
- Posts: 54
- Thank you received: 9
19 May 2025 09:08 - 19 May 2025 09:15 #328728
by MRx
Replied by MRx on topic Mitsubishi SSCNET
I wonder did you fully reverse engineer the commands for velocity mode?
Are you sending exactly the same values as the original controllers do for the selected RPM?
When I had a look at it last time I found out that the values don't directly translate to the requested RPM value, at least there's no linear mapping, it is a little bit off from time to time.
Are you sending exactly the same values as the original controllers do for the selected RPM?
When I had a look at it last time I found out that the values don't directly translate to the requested RPM value, at least there's no linear mapping, it is a little bit off from time to time.
Last edit: 19 May 2025 09:15 by MRx.
Please Log in or Create an account to join the conversation.
- dm17ry
-
- Offline
- Elite Member
-
Less
More
- Posts: 203
- Thank you received: 88
19 May 2025 13:17 #328742
by dm17ry
Replied by dm17ry on topic Mitsubishi SSCNET
do you mean for a spindle? haven't looked at it yet.
i would be surprised if servos have velocity control... or do they?
i would be surprised if servos have velocity control... or do they?
Please Log in or Create an account to join the conversation.
- MRx
- Offline
- Senior Member
-
Less
More
- Posts: 54
- Thank you received: 9
12 Feb 2026 15:52 - 12 Feb 2026 15:54 #342849
by MRx
I have also implemented support for MDS-B-SVJ2 Servos via ethernet. That's the first test. X/Y/Z and the spindle are ok (the video only shows X/Y). I will make some other videos within the next weeks. For a test it's connected via USB ethernet adapter to my notebook (I will move it to a raspberry PI within th next days)
Still quite some way to go .. tool changer, lubrication system, chip conveyor and so on. My Meldas M65 controller had issues with the battery 3 times in a row (and we bought them original from Mitsubishi), everytime the settings are gone we would have to drive to Mitsubishi to put the options in... I'm done with that and move the system to LinuxCNC now.
Replied by MRx on topic Mitsubishi SSCNET
I have also implemented support for MDS-B-SVJ2 Servos via ethernet. That's the first test. X/Y/Z and the spindle are ok (the video only shows X/Y). I will make some other videos within the next weeks. For a test it's connected via USB ethernet adapter to my notebook (I will move it to a raspberry PI within th next days)
Still quite some way to go .. tool changer, lubrication system, chip conveyor and so on. My Meldas M65 controller had issues with the battery 3 times in a row (and we bought them original from Mitsubishi), everytime the settings are gone we would have to drive to Mitsubishi to put the options in... I'm done with that and move the system to LinuxCNC now.
Last edit: 12 Feb 2026 15:54 by MRx.
The following user(s) said Thank You: tommylight, COFHAL, NWE
Please Log in or Create an account to join the conversation.
- dm17ry
-
- Offline
- Elite Member
-
Less
More
- Posts: 203
- Thank you received: 88
13 Feb 2026 18:10 - 13 Feb 2026 18:11 #342897
by dm17ry
Replied by dm17ry on topic Mitsubishi SSCNET
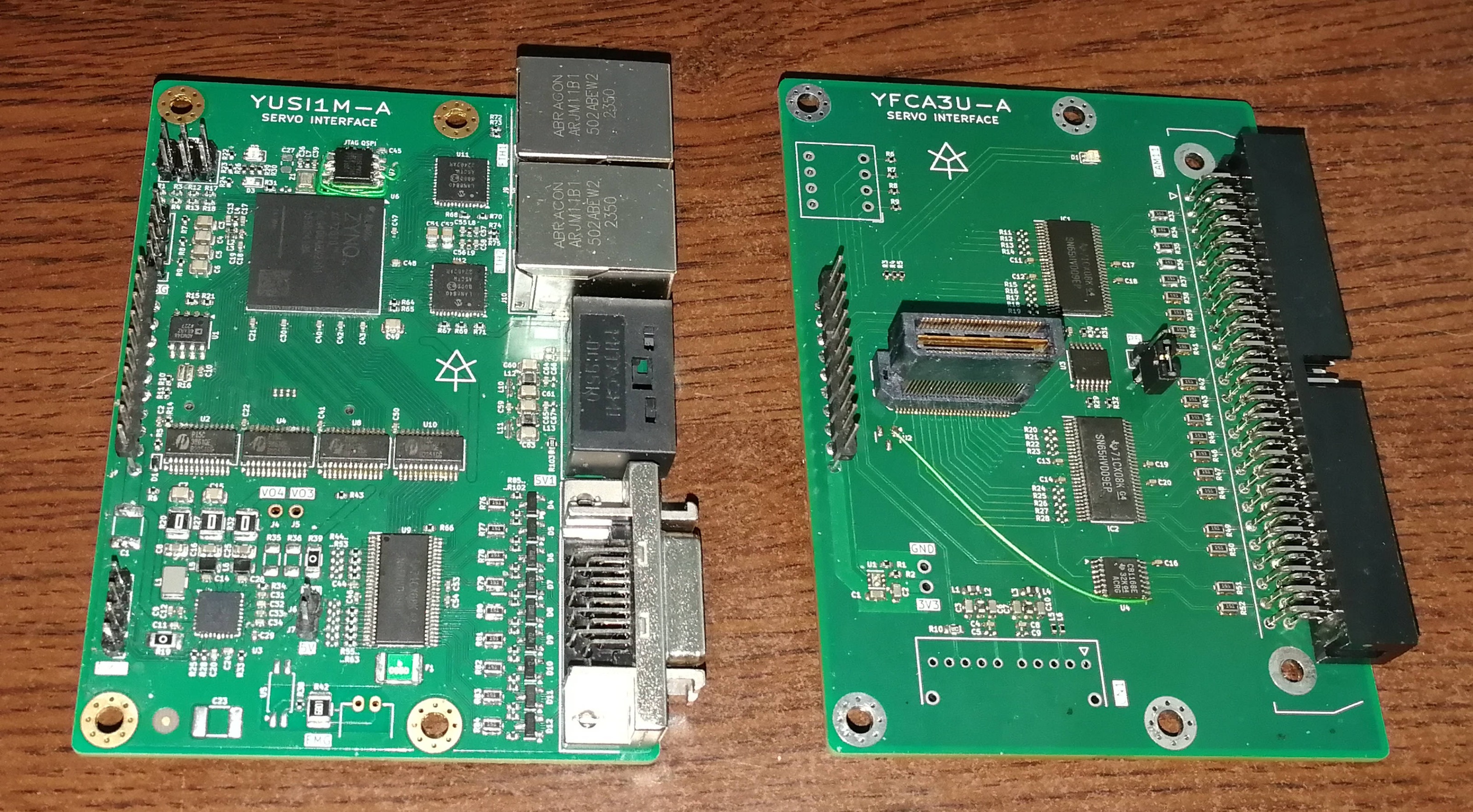
MRx, nice! what hardware are you using?
and i'm still working on the new platform, also with an ethernet interface... now i can have all supported mitsubishi protocols running simultaneously on a single zynq 7010 core") ok, 5 of them - parallel bus (MR-S), 2 copper serial (SSCNET I, II, MELDAS 5/6), 2 fiber (SSCNET III, III/H, MELDAS 7, 8). as all of them share the same multiple-of-222us cycle time...
ok, 5 of them - parallel bus (MR-S), 2 copper serial (SSCNET I, II, MELDAS 5/6), 2 fiber (SSCNET III, III/H, MELDAS 7, 8). as all of them share the same multiple-of-222us cycle time...
still have the second processor core and a spare PTPv2-capable 1Gb ethernet port to try the CC-Link IE/TSN thing to complete the picture...
and i'm still working on the new platform, also with an ethernet interface... now i can have all supported mitsubishi protocols running simultaneously on a single zynq 7010 core
ok, 5 of them - parallel bus (MR-S), 2 copper serial (SSCNET I, II, MELDAS 5/6), 2 fiber (SSCNET III, III/H, MELDAS 7, 8). as all of them share the same multiple-of-222us cycle time...still have the second processor core and a spare PTPv2-capable 1Gb ethernet port to try the CC-Link IE/TSN thing to complete the picture...
Last edit: 13 Feb 2026 18:11 by dm17ry.
The following user(s) said Thank You: NWE
Please Log in or Create an account to join the conversation.
- MRx
- Offline
- Senior Member
-
Less
More
- Posts: 54
- Thank you received: 9
13 Feb 2026 23:32 - 14 Feb 2026 03:58 #342919
by MRx
Replied by MRx on topic Mitsubishi SSCNET
I also ordered some Ethercat boards to play around with it, for now I just use regular Ethernet. I will suspend working on it until after chinese new year since I need connectors.
I also hope I can get hands on more Mitsubishi/possibly other machinery in Taiwan.
Chaining up multiple boards with Ethercat seems to be interesting, especially for the peripheral part.
The Zynq is definitely super powerful, I was able to get away with a microcontroller and accurate timings.
But the MDS-B series only needs 3.55ms framing, not 0.222, jitter is around 20ns (while the measured jitter on the Meldas M65 controller is 40-60 ns .. of course all relatively due to my non certified measurement equipment).
My plan is to make it pretty much modular with Ethercat chaining up various modules for certain tasks.
I want to mix my system with different motors than Mitsubishi for 5 axis support.
I have an old DE2 FPGA board (with ethernet), and a couple of LatticeSemi LFE3/5 boards (also with Ethernet) here which I almost wanted to use for it. I think I will just stick with various microcontrollers and small FPGAs if needed to keep it simple in the future.
I also hope I can get hands on more Mitsubishi/possibly other machinery in Taiwan.
Chaining up multiple boards with Ethercat seems to be interesting, especially for the peripheral part.
The Zynq is definitely super powerful, I was able to get away with a microcontroller and accurate timings.
But the MDS-B series only needs 3.55ms framing, not 0.222, jitter is around 20ns (while the measured jitter on the Meldas M65 controller is 40-60 ns .. of course all relatively due to my non certified measurement equipment).
My plan is to make it pretty much modular with Ethercat chaining up various modules for certain tasks.
I want to mix my system with different motors than Mitsubishi for 5 axis support.
I have an old DE2 FPGA board (with ethernet), and a couple of LatticeSemi LFE3/5 boards (also with Ethernet) here which I almost wanted to use for it. I think I will just stick with various microcontrollers and small FPGAs if needed to keep it simple in the future.
Last edit: 14 Feb 2026 03:58 by MRx.
Please Log in or Create an account to join the conversation.
- Xnke
- Offline
- Senior Member
-
Less
More
- Posts: 79
- Thank you received: 3
13 Mar 2026 17:38 #344220
by Xnke
Replied by Xnke on topic Mitsubishi SSCNET
I've finally gotten a little time to work on this again!
I'm still planning to use the MR-J3-70A drives, which I have already. What is the current state of support for the copper network drives?
I'm still planning to use the MR-J3-70A drives, which I have already. What is the current state of support for the copper network drives?
Please Log in or Create an account to join the conversation.
- dm17ry
-
- Offline
- Elite Member
-
Less
More
- Posts: 203
- Thank you received: 88
14 Mar 2026 06:32 #344232
by dm17ry
Replied by dm17ry on topic Mitsubishi SSCNET
MR-J3-A (as well as MR-J,J2,J2S,J4,J5-A) drives have generic pulse train position or +-10V analog speed and/or torque control
MR-J,J2,J2S-B - copper SSCNET I/II control interface
MR-J3,J4,J5-B - optical SSCNET III or III/H
MR-J5-G - CC-Link IE TSN over gigabit Ethernet
MR-J5-G-N1 - EtherCAT
MR-J,J2,J2S-B - copper SSCNET I/II control interface
MR-J3,J4,J5-B - optical SSCNET III or III/H
MR-J5-G - CC-Link IE TSN over gigabit Ethernet
MR-J5-G-N1 - EtherCAT
Please Log in or Create an account to join the conversation.
- dm17ry
-
- Offline
- Elite Member
-
Less
More
- Posts: 203
- Thank you received: 88
19 Mar 2026 16:08 #344524
by dm17ry
Replied by dm17ry on topic Mitsubishi SSCNET
and some more cross-generation mating... the MDS-E-V2 drive (2024) happily talking to the MDS-A-CR (1995) power supply without any persuation...
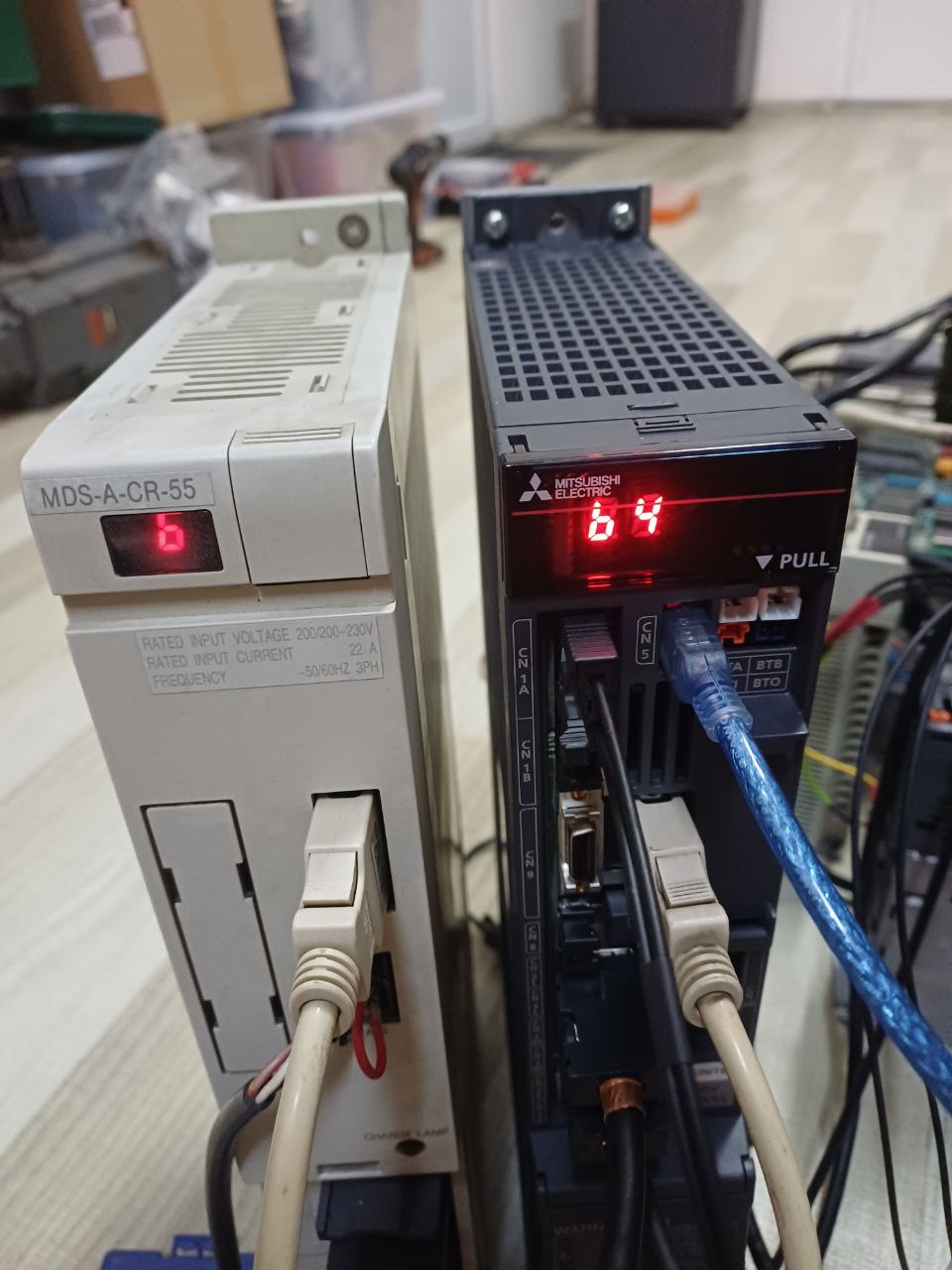
the MDS-E-V2 drive (2024) happily talking to the MDS-A-CR (1995) power supply without any persuation...
Attachments:
The following user(s) said Thank You: tommylight, NWE
Please Log in or Create an account to join the conversation.
Time to create page: 0.227 seconds