AX58100
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
17 Dec 2024 02:39 #316830
by Hakan
Replied by Hakan on topic Step scale
I think so.
Is there anything suspicuous?
Comments.
appTimePeriod must match the SERVO_CYCLE setting in the ini file. If you go for a SERVO_CYCLE of 2ms, change appTimePeriod to 2000000 as well.
The dcConf line says the Ethercat device is running its own loop at 1 ms, synchronized by ethercat"s own internal clock. Sync0Shift says when, inside that 1 ms, the sync event takes place. 1000000 means right at the end of that 1 ms.
Is there anything suspicuous?
Comments.
appTimePeriod must match the SERVO_CYCLE setting in the ini file. If you go for a SERVO_CYCLE of 2ms, change appTimePeriod to 2000000 as well.
The dcConf line says the Ethercat device is running its own loop at 1 ms, synchronized by ethercat"s own internal clock. Sync0Shift says when, inside that 1 ms, the sync event takes place. 1000000 means right at the end of that 1 ms.
The following user(s) said Thank You: COFHAL
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
Less
More
- Posts: 457
- Thank you received: 62
31 Jan 2025 01:29 - 31 Jan 2025 01:31 #320194
by COFHAL
Replied by COFHAL on topic MAX VELOCITY STEP.
I have already tested the STEP generators and they work perfectly, the only problem I have found is that the maximum speed I have achieved is 12, any higher speed immediately gives a join X following error. I tried changing the FERROR and MIM ERROR values, it improves I can increase the speed but in the end the following error appears again.
Last edit: 31 Jan 2025 01:31 by COFHAL.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
31 Jan 2025 06:52 - 31 Jan 2025 15:02 #320209
by Hakan
Replied by Hakan on topic MAX VELOCITY STEP.
So you are still working on this? Great to see.
There can be a few reasons behind this.
Let's think. The motion component generates the wanted position in joint.0.motor-pos-cmd, sends that off to the EtherCAT device and receives the actual position, as the stepper driver sees it, in joint.0.motor-pos-fb. The difference between them is the following error. Which also happens to be available as joint.0.f-error.
I am thinking along the lines of either a scaling issue or you are asking the stepper driver to make steps at a higher rate than it can generate.
Let's first verify the behavior of the following error. Start halscope and record the signals joint.0.motor-pos-cmd, joint.0.motor-pos-fb and joint.0.f-error when you run the axis at below the critical speed and above the critical speed. One wants to see how those signals develop up to and including the following error stop. If you post screen dumps of halscope for those two situations I can help to take next step.
There can be a few reasons behind this.
Let's think. The motion component generates the wanted position in joint.0.motor-pos-cmd, sends that off to the EtherCAT device and receives the actual position, as the stepper driver sees it, in joint.0.motor-pos-fb. The difference between them is the following error. Which also happens to be available as joint.0.f-error.
I am thinking along the lines of either a scaling issue or you are asking the stepper driver to make steps at a higher rate than it can generate.
Let's first verify the behavior of the following error. Start halscope and record the signals joint.0.motor-pos-cmd, joint.0.motor-pos-fb and joint.0.f-error when you run the axis at below the critical speed and above the critical speed. One wants to see how those signals develop up to and including the following error stop. If you post screen dumps of halscope for those two situations I can help to take next step.
Last edit: 31 Jan 2025 15:02 by Hakan. Reason: should be joint.0 not motion.0
The following user(s) said Thank You: COFHAL
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
Less
More
- Posts: 457
- Thank you received: 62
31 Jan 2025 18:31 #320250
by COFHAL
Replied by COFHAL on topic MAX VELOCITY STEP.
The pins joint.0.motor-pos-cmd and joint.0.motor-pos-fb do not exist, the ones that do appear are join.0.motor-pos-cmd and join.0.motor-pos.fb, are those the ones I have to check with halscope? I have never used halscope, I will have to learn how to use it.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
01 Feb 2025 08:30 #320306
by Hakan
Replied by Hakan on topic MAX VELOCITY STEP.
They should definitely be called joint.0 if they don't there might be bigger problems. The "0" of course refers to the number of the joint that gives the following error.
You find the pin names here
linuxcnc.org/docs/html/man/man9/motion.9.html#JOINT%20PINS
motor-pos-cmd
motor-pos-fb
f-error
are the interesting ones.
There are tutorials on halscope out there. It's a good tool to know how to handle. Basically select the three pins in the fields down below, adjust scaling and offset (can be done later as well). Set to record every millisecond, as long as possible. Manual trigger, and trigger when you get get the following error. It keeps a buffer of recorded data so you won't miss it even if you trigger slightly afterwards. Then adjust the curves with the same scaling for motor-pos-cmd and motor-pos-fb so they can be compared, and put up f-error as well, with a proper scaling so one can see it develop.
You find the pin names here
linuxcnc.org/docs/html/man/man9/motion.9.html#JOINT%20PINS
motor-pos-cmd
motor-pos-fb
f-error
are the interesting ones.
There are tutorials on halscope out there. It's a good tool to know how to handle. Basically select the three pins in the fields down below, adjust scaling and offset (can be done later as well). Set to record every millisecond, as long as possible. Manual trigger, and trigger when you get get the following error. It keeps a buffer of recorded data so you won't miss it even if you trigger slightly afterwards. Then adjust the curves with the same scaling for motor-pos-cmd and motor-pos-fb so they can be compared, and put up f-error as well, with a proper scaling so one can see it develop.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
04 Feb 2025 15:11 #320611
by Hakan
Replied by Hakan on topic MAX VELOCITY STEP.
Hi, any progress?
In the software there is not so much to change, but there is the MAX_ACCELERATION setting. It will restrict the acceleration if set lower in the ini file.
You can have a look and see what you have there. The last lines in StepGen3.h
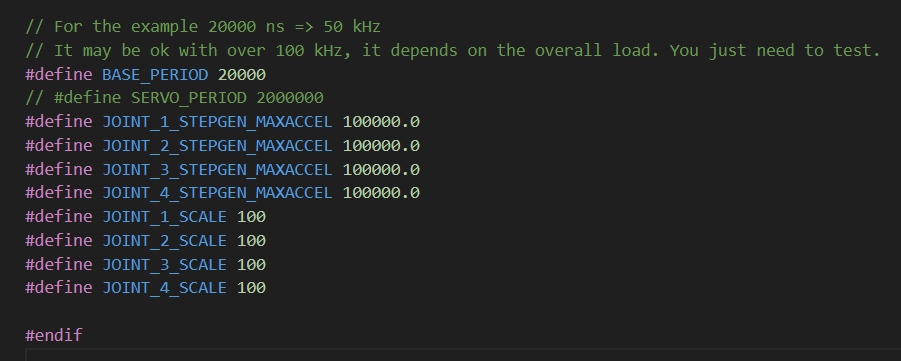
In the software there is not so much to change, but there is the MAX_ACCELERATION setting. It will restrict the acceleration if set lower in the ini file.
You can have a look and see what you have there. The last lines in StepGen3.h
Attachments:
The following user(s) said Thank You: COFHAL
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
Less
More
- Posts: 457
- Thank you received: 62
04 Feb 2025 20:22 #320652
by COFHAL
Replied by COFHAL on topic MAX VELOCITY STEP.
I haven't had time to use halscope, I'll look at your recommendation for modifying the firmware.
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
Less
More
- Posts: 457
- Thank you received: 62
18 Feb 2025 19:16 #321934
by COFHAL
Replied by COFHAL on topic MAX VELOCITY STEP.
In the firmware the stepgen scale JOINT_1_SCALE is defined at 100. I put that value in STEP_SCALE in the ini file and the speed is no longer limited nor does it give me a following error. I don't know if I'm wrong but the value of STEP_SCALE in the ini file is determined by the value programmed in StepGen3.h. Or I don't understand what the value JOINT_X_SCALE refers to.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
18 Feb 2025 19:50 #321938
by Hakan
Replied by Hakan on topic MAX VELOCITY STEP.
Yes. yes. yes. hmmm.
Yeah I think you are right, those JOINT_1_SCALE should be brought out as a pdos, not be a firmware constant.
Should of course not be a constant haha. My mistake there. From development and testing. Set them to what you found worked.
The SCALE and also MAX_ACCELERATION variables should be brought of from the firmware to hal or as a sdos in ethercat-config.xml.
I need to work on that, haven't been able to make writable sdos yet. Readable is ok. I think it is some minor thing, but takes time to find it.
Can also be pdos.
So if you can make the changes you need then I will come back on this topic in a week or two. To see where you are and what changes you have made, and update the firmware on github with for example the scale and max_acceleration parameters.
Yeah I think you are right, those JOINT_1_SCALE should be brought out as a pdos, not be a firmware constant.
Should of course not be a constant haha. My mistake there. From development and testing. Set them to what you found worked.
The SCALE and also MAX_ACCELERATION variables should be brought of from the firmware to hal or as a sdos in ethercat-config.xml.
I need to work on that, haven't been able to make writable sdos yet. Readable is ok. I think it is some minor thing, but takes time to find it.
Can also be pdos.
So if you can make the changes you need then I will come back on this topic in a week or two. To see where you are and what changes you have made, and update the firmware on github with for example the scale and max_acceleration parameters.
The following user(s) said Thank You: COFHAL
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
22 Feb 2025 07:57 #322255
by Hakan
Replied by Hakan on topic MAX VELOCITY STEP.
Maybe it is time to do some improvements and clean up. Like making PDOs of the scale and max-acceleration.
I wonder how much you have done to the code?
I can bring in those changes in the code, and push an update to github.
I wonder how much you have done to the code?
I can bring in those changes in the code, and push an update to github.
Please Log in or Create an account to join the conversation.
Time to create page: 0.208 seconds