- Hardware & Machines
- CNC Machines
- Milling Machines
- Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
13 Nov 2020 17:46 #189230
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd, many thanks. From your comment " following error limits (both min and max) to larger values " this is actually looks as follows: FERROR & MIN_ERROR; correct? This is the 3nd & 4th lines under the (AXIS 0) heading. Just want to be clear.
many thanks!
many thanks!
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21734
- Thank you received: 7425
13 Nov 2020 18:04 #189235
by tommylight
But i never do that, i use this:
forum.linuxcnc.org/10-advanced-configura...ning-detailed-how-to
Replied by tommylight on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Yes.Todd, many thanks. From your comment " following error limits (both min and max) to larger values " this is actually looks as follows: FERROR & MIN_ERROR; correct? This is the 3nd & 4th lines under the (AXIS 0) heading. Just want to be clear.
many thanks!
But i never do that, i use this:
forum.linuxcnc.org/10-advanced-configura...ning-detailed-how-to
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
13 Nov 2020 18:19 - 13 Nov 2020 20:20 #189237
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd & tommylight, many thanks for your help. This attachment is the pic of what I have tried today. I have temporary edited .ini file for greater error values, this seems to have helped a bit. tommylight, I will reread your tuning procedure, I have used it in the past, many thanks!!
Edit: new pic with P=3.5; FF1=.001; Feed 1"/min (as per tommylight method!, many thanks)
2nd edit; What does the "axis f error" represent in the pic, 100u/div scale?
Edit: new pic with P=3.5; FF1=.001; Feed 1"/min (as per tommylight method!, many thanks)
2nd edit; What does the "axis f error" represent in the pic, 100u/div scale?
Last edit: 13 Nov 2020 20:20 by new2linux. Reason: add pic; add 2nd pic
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
14 Nov 2020 14:02 - 16 Nov 2020 17:05 #189332
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Many thanks for all the help!! Attached is a pic of the hal scope at 4.5"/min. After review of tommylight's tuning guide, I am not able to stop the hal scope (stop the trace) if I use the "auto & roll" in the upper right side of hal Oscope, the trace will just not stop so I can take screen-shot. What worked this time, but need to set up every time is use the "auto & single", this is what I used for this pic. The motors have good resistance to motion by hand, even with the low P value. If you increase the feed rate to say 20"/min, the motors will start oscillating. My goal is to flatten out the "rise of the axis f-error " line, correct?
many thanks
Attached is a pic of the tuning process at 20"/min; P=.089; FF1=.0155; & FF2=.00001. If you re-home the (F2 is down) the DRO will show and you can feel in the hand-wheel for the x axis some oscillation, every time, until it settles down.
If (F2 is down) and try to turn hand wheel (don't move motor, just light pressure) firm resistance is there; but if quickly reverse direction and keep light pressure, it still allow motion for short distance. The screen is difficult to set up for pic, need to use "stop" and then enlarge screen, I have not been able to have "auto" to work. I use a set up file, just for the x axis and save it so easy to find next time.
many thanks
many thanks
Attached is a pic of the tuning process at 20"/min; P=.089; FF1=.0155; & FF2=.00001. If you re-home the (F2 is down) the DRO will show and you can feel in the hand-wheel for the x axis some oscillation, every time, until it settles down.
If (F2 is down) and try to turn hand wheel (don't move motor, just light pressure) firm resistance is there; but if quickly reverse direction and keep light pressure, it still allow motion for short distance. The screen is difficult to set up for pic, need to use "stop" and then enlarge screen, I have not been able to have "auto" to work. I use a set up file, just for the x axis and save it so easy to find next time.
many thanks
Last edit: 16 Nov 2020 17:05 by new2linux. Reason: add current pic
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
17 Nov 2020 19:37 #189611
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
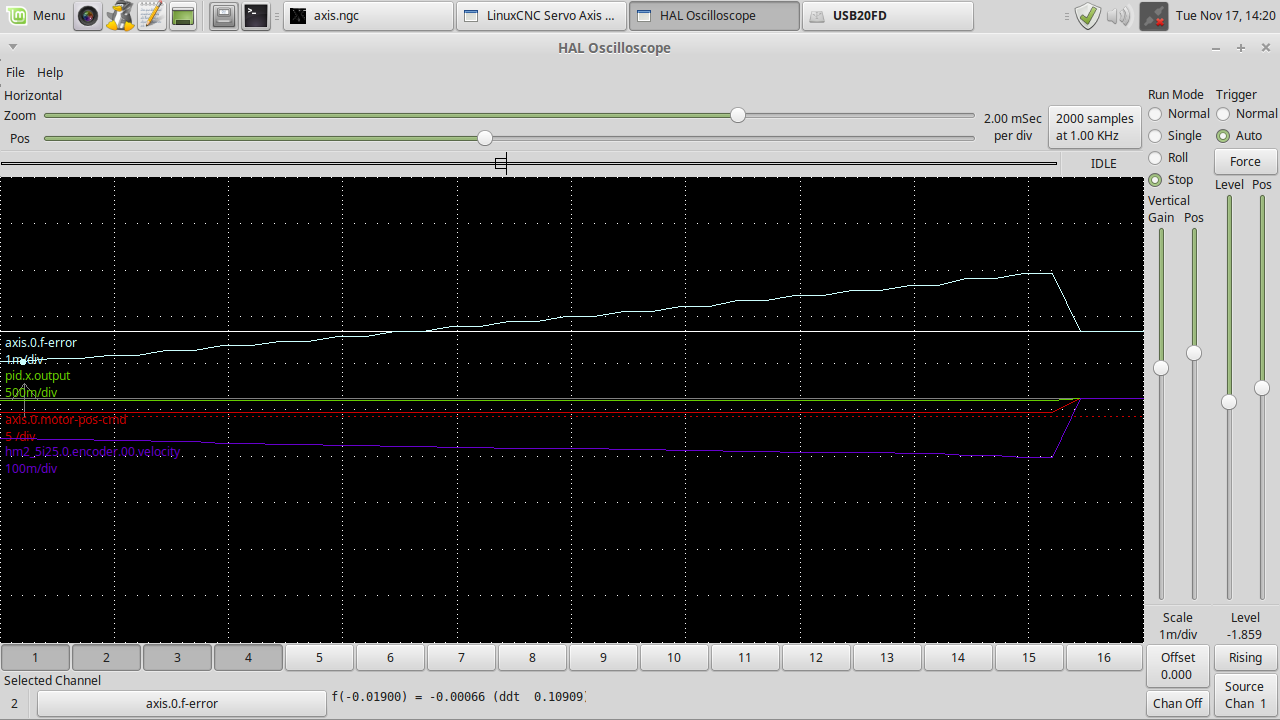
Many thanks! This is the most recent pic of (hal scope) the x axis, I have tried many ways just not shore of the specific area of the trace I should be looking at. This pic is set at: 15"/min feed, P=.089; I=.015; D=.02; FF1=.015555; FF2=.0.0; DEADBAND=0.1 I need a second opinion. The hal scope will not trigger well. Motors have good resistance to motion.
many thanks, all help warmly welcomed.
many thanks, all help warmly welcomed.
Attachments:
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
17 Nov 2020 20:38 - 17 Nov 2020 20:52 #189617
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
I think I see some errors in your hal file.
You should comment out any line with
So, for example, changeto
Having the pid.n.command-deriv hal pin connected to a signal that isn't connected to an output hal pin. Has the effect of disabling the FF1.
It might also be helpful to connect pid.x.feedback−deriv to the signal x-vel-fb by adding a line like this to your hal file. (but it should still "work" without it.)
PS: The above errors are the result of a bug in PNCconfig (this was corrected in later versions) that was uncovered by a correction of a long standing bug in the PID component that cause the pid to always ignore the pid.N.command-deriv input and calculate that value internally. It is supposed to only do that if nothing is connected to it. When that was corrected connecting that pin to a null signal (like PNCconfig did) results in a 0 value which causes all sorts of problems.
You should comment out any line with
net n-vel-cmd => pid.n.command-derivSo, for example, change
net x-vel-cmd => pid.x.command-deriv#net x-vel-cmd => pid.x.command-derivHaving the pid.n.command-deriv hal pin connected to a signal that isn't connected to an output hal pin. Has the effect of disabling the FF1.
It might also be helpful to connect pid.x.feedback−deriv to the signal x-vel-fb by adding a line like this to your hal file. (but it should still "work" without it.)
net x-vel-fb => pid.x.feedback−derivPS: The above errors are the result of a bug in PNCconfig (this was corrected in later versions) that was uncovered by a correction of a long standing bug in the PID component that cause the pid to always ignore the pid.N.command-deriv input and calculate that value internally. It is supposed to only do that if nothing is connected to it. When that was corrected connecting that pin to a null signal (like PNCconfig did) results in a 0 value which causes all sorts of problems.
Last edit: 17 Nov 2020 20:52 by Todd Zuercher. Reason: Added PS explaination.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
18 Nov 2020 13:45 #189666
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd, Many thanks! I am attaching the change as per your suggestion in the hope that it will be reviewed for being correct. I edited both the x & y axis. I plan to revisit the .ini file to use the original "FERROR & MIN_ERROR" if this works ok. I will be working with this change today.
many thanks
many thanks
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
18 Nov 2020 13:58 #189672
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Looks ok. Hopefully now the PID will respond to FF1 settings and you may have better luck tuning.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
18 Nov 2020 18:17 - 18 Nov 2020 19:31 #189703
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
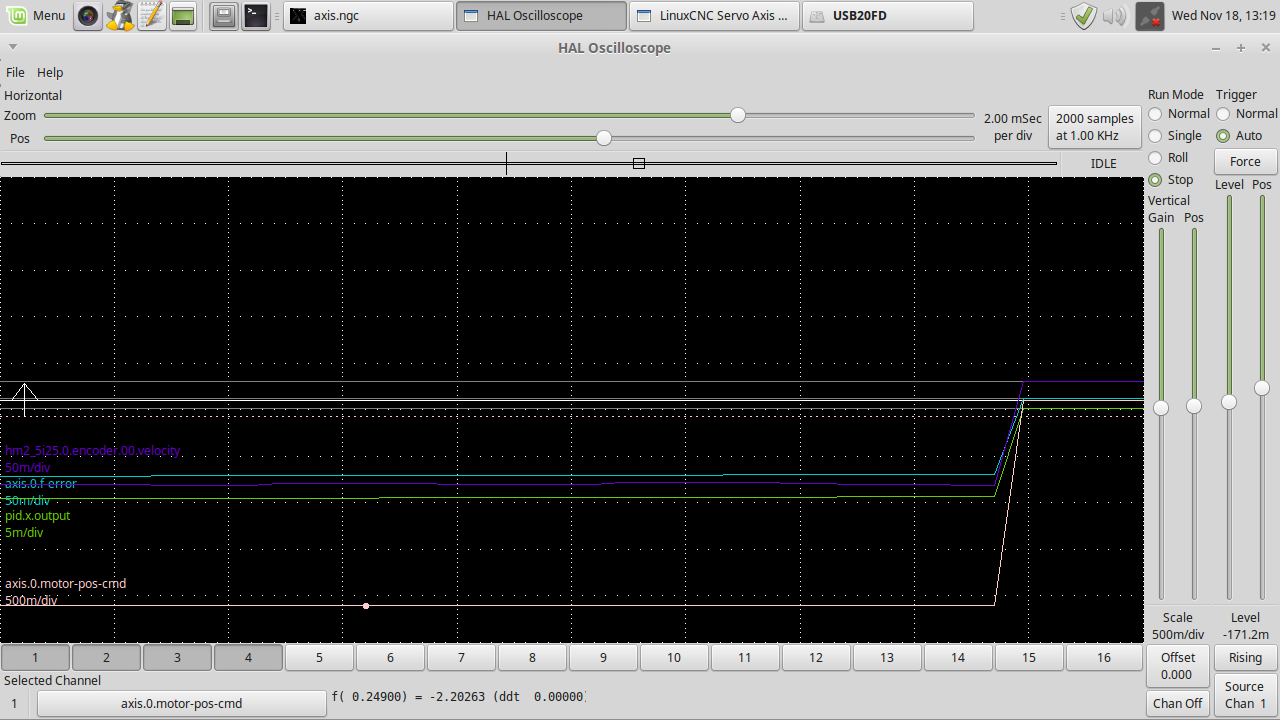
Todd, Many thanks! I have tried several ranges of many combinations, attached is 20"/min feed. Not shore what to be looking at or for. This is as quick of feed as I have had so far, more feed and the oscillation starts.
Many thanks!
The settings are: P.115; I.001; D.01; FF1-.001; FF2-.0003; Db.0004
This is a pic of the pid trace crossing over (several times in single 24"/min test) the velocity trace. Settings P.111; I.001; D .05; FF1 .001; FF2 .003; DeadBand .00001
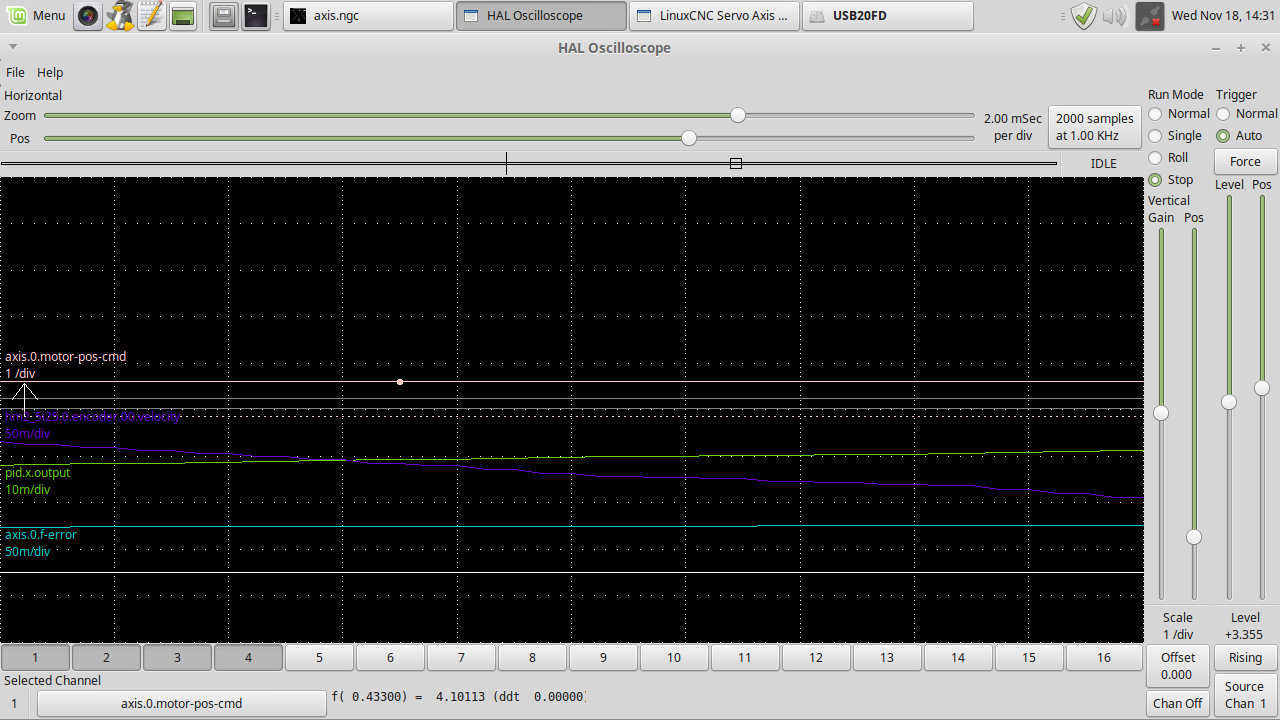
many thanks!
Many thanks!
The settings are: P.115; I.001; D.01; FF1-.001; FF2-.0003; Db.0004
This is a pic of the pid trace crossing over (several times in single 24"/min test) the velocity trace. Settings P.111; I.001; D .05; FF1 .001; FF2 .003; DeadBand .00001
many thanks!
Attachments:
Last edit: 18 Nov 2020 19:31 by new2linux.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
19 Nov 2020 03:49 #189750
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
I'm sorry but how you have halscope configured just isn't showing me anything useful. I usually use an incremental jog set for a move long enough that I can see all portions of the move, at rest, acceleration, cruise, deceleration, and at rest again, all on the screen at the same time. I also usually watch the axis velocity command and use it as the trigger source.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Time to create page: 0.392 seconds